
TheRat
France
Asked
— Edited
Roli H-Bridge Question Too
Hi,
I have a probleme with my Roli h-bridge.
I checked my connections like explained in those posts : https://synthiam.com/Tutorials/Lesson/44 https://synthiam.com/Community/Questions/6809&page=2
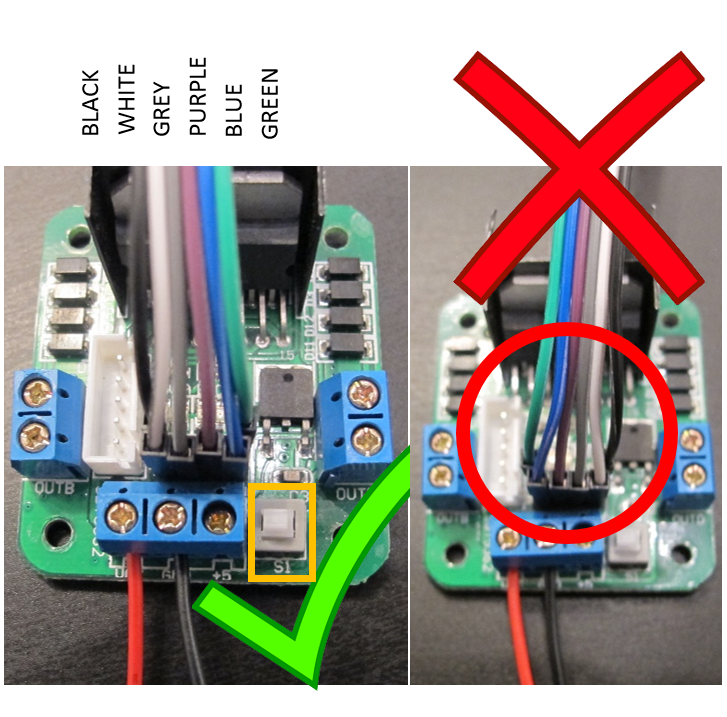
My h-bridge was initially connected like the wrong way as here :

Now when I open the exemple project from roli in ARC , if I want to go forward, only the right motor is going forward (nok), if I want to go right, only right motor is going backward (nok), if I want to go backward, the two motors are going backward (ok), if I want go left, left motor is going backard, right motor is going forward (ok).
I don't know where is my mistake.
Thanks

Did you set the pwm speed?
Modifying the project did you accidentally miss the speed initialization script for the hbridge in the connection control?
here is the init script :
Hello,
Sorry, I did not have time to see my problem.
Maybe I could during the Christmas holiday;)