
jstarne1
Reading A Second Echo To Identify Edges And Small Objects Sr04
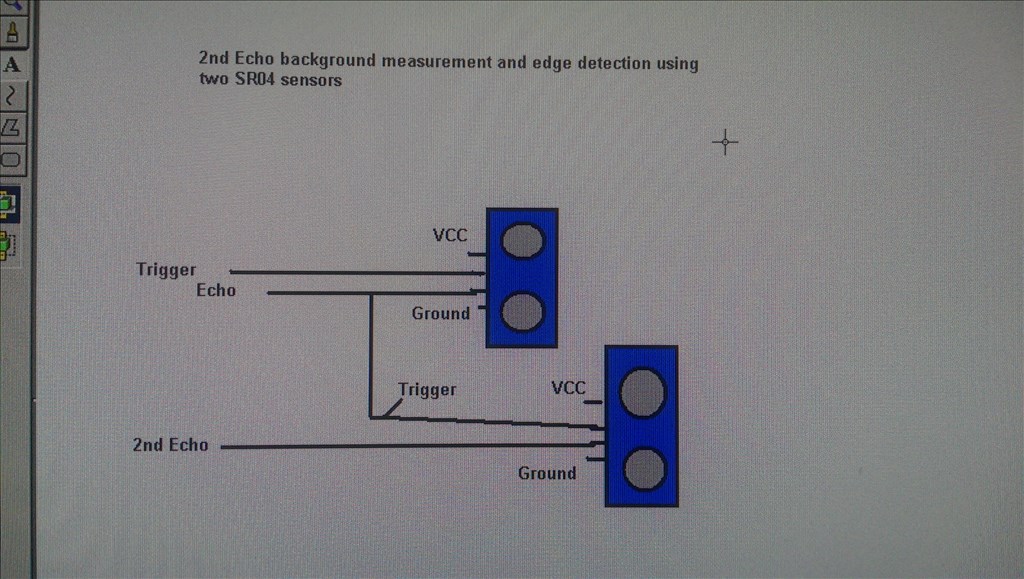
I found this "tip" while researching setups from other robot projects and thought it was interesting. If you are using a sr04 ultrasonic sensor it reads the first ping it receives after the trigger pulse and stops. With this setup once the first ping is received it is recycled as a trigger to a second sensor. The second sensor tx must be muted (covered with tape) and the second sensor reads the echo from the back ground. This is for identifying edges of large objects and doorways.
Any suggestions or thoughts are appreciated I just found this interesting and I will add sketches to illustrate what I'm talking about.
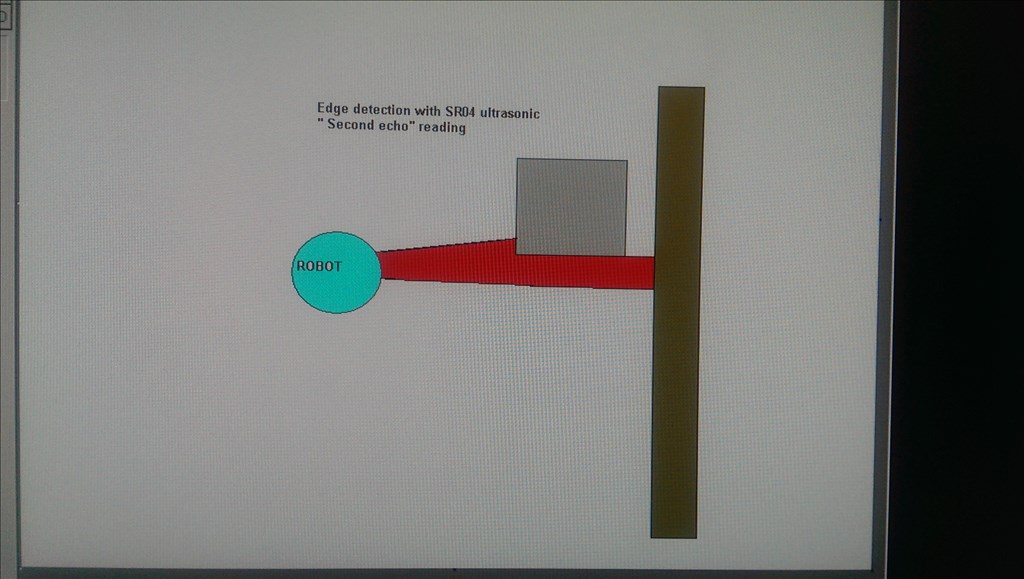
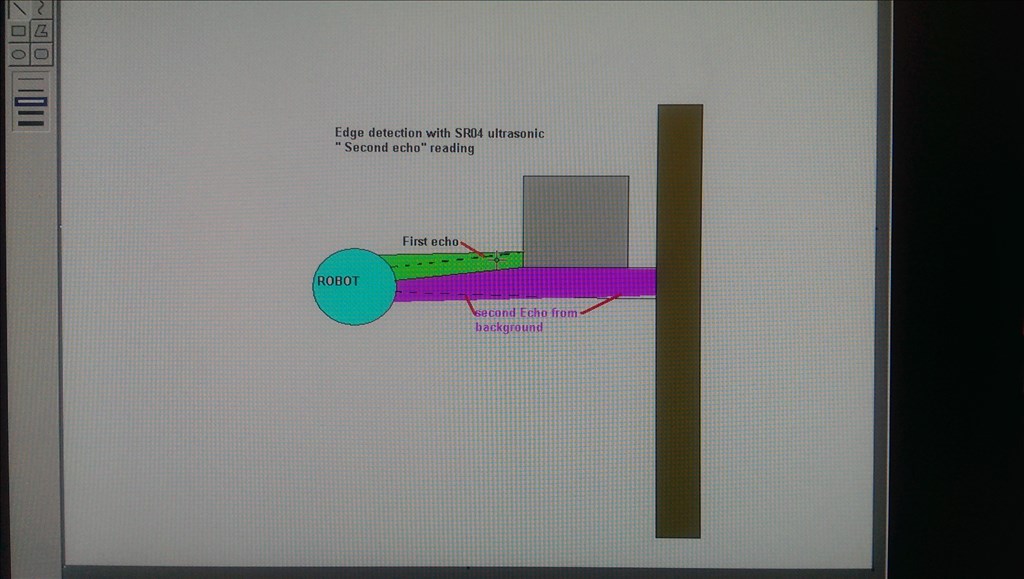
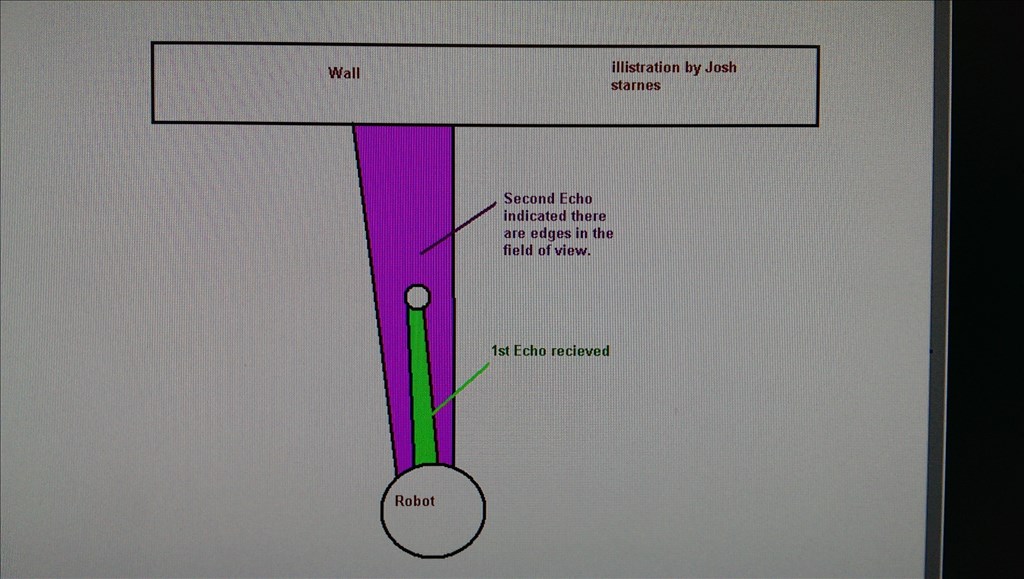
I don't know how the script would be written to utilize edge information but it does seem like this could be useful to inform the robot this is a possible doorway or an object it can go around and not just perceive it as a wall to completely avoid. Thanks guys.

Thats a really good find, Josh.
I agree with Troy nice find will have to save this post.
I like to share the cool stuff. I'm sure there's a way to utilize the radar control to do this but not everyone uses the radar pan servo on their robot.
Either way its still a great idea to get more accurate data for the surroundings
The only script commands for the ping sensor are GetPing() and Ping_Wait(). Both of which require a single trig and single echo port. All of the technical stuff and calculations etc. that are required by the microcontroller are done within the GetPing() command.
Very interesting tip ! Thanks a lot !