joedesl
Canada
Asked
— Edited
Question About Xbox 360 Controller
when i connect the controller to ARC i can use the left joystick fine, but the right joystick has no response. except the x axis of the joystick is my left and right triggers.
ive searched through the forums and didnt run across anyone with the same issue. does anybody know what i am doing wrong here?

Did you set a servo port # to the y axis in the EZ-B config of the joystick?
ya sorry i meant to say y axis, but i did try all variations. my goal is to control the direction and speed of my left and right motors using the left and right joysticks. right now i am controlling the left motor with the left stick and the right motor with the triggers ( forward is left trigger and reverse is right) this makes it really tricky to drive at any speed because the triggers( z-axis) seem to respond more exponential and the sticks seem to be linear.
just incase anyone was wondering what i am driving. it is a roughly 300 lb bot driven by 24 volt 20 amp motors and i am using a sabortooth dual 50 amp hv motor driver.. seems really big but i have a very large lawn to cut, takes about 6 good hours by hand.
Cool! Pics?
I am doing a same build, 24v to a 40amps Inline fuse to a rocker switch to sabertooth 2x25, to 2 100w scooter motors. I'm controlling the sabertooth by the EZ-B/joystick.
did you try playing around with the dip switches on the sabertooth? Setting it to RC mode and also adding the modified servo Movement Panel tied with the joystick panel.
On the Movement Panel set each motor singnal coming from sabertooth to a servo port# and take the 2 servo port # and include them in the joystick config.
I ll try to add some pics later today Hope that works
@joedesl I'm unsure about the xBox controller, but some controllers use the right joystick as "buttons". I have a joystick which has a setting to enable/disable the right analog joystick buttons and configure it as another analog joystick.
Just to clarify, when you use the right joystick on the xbox controller, it is pressing the buttons and not controlling servos? If you're unsure, load the CONFIG menu of the joystick control. Begin moving the right joystick, and if you see the buttons highlighting, that is what is happening.
Is there a specific driver or application utility required to make the xBox controller work in Windows?
no pics yet, sorry.
i tried setting it to pistol grip style rc remote mode, where s1 controls the throttle and s2 controls left and right. works great! i use the left stick for throttle and the triggers for steering.
thats what i thought too but i get nothing on ARC. i just installed motionjoy, hopefully with that i can change the controls on the xbox controller.
one slighlty big problem i had was when the bot went out of range the controls stuck and i was chasing it down the driveway. does anyone know of a way to create some kind of failsafe to prevent this?
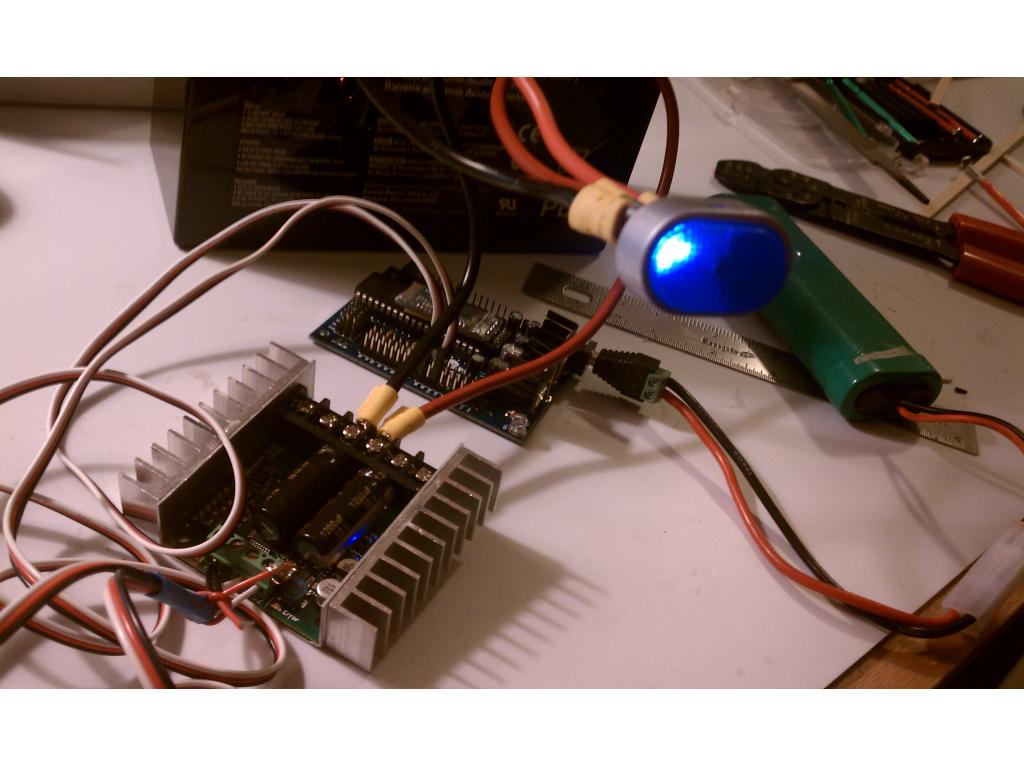
this is my set up,
I connect the red&black wire of one motor to M1A & M1B and then the other motor to M2A & M2B then look at the dip switches on the left and set it like this:
here is a sabertooth wizard that will help too https://dimensionengineering.com/datasheets/Sabertoothdipwizard/start.htm
Hope that helps