Asked
— Edited
New Part For Six
hi guys
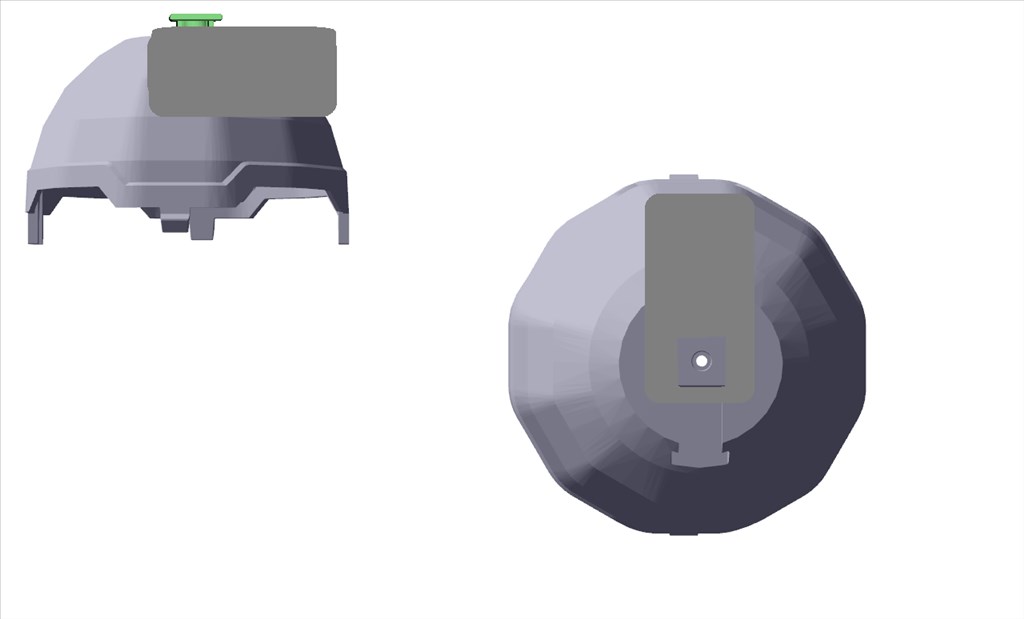
what you think off a new dome for six. sinds there is alot off room in the dome for a servo. iff you wanna use the jd ontop the six.(turning waist)
 Custom Movement Panel
— Custom Movement Panel maps directional commands to scripts, adjusts per-wheel speed (0-255), and integrates with joysticks for unsupported motors
Try it →
Custom Movement Panel
— Custom Movement Panel maps directional commands to scripts, adjusts per-wheel speed (0-255), and integrates with joysticks for unsupported motors
Try it →
hi guys
what you think off a new dome for six. sinds there is alot off room in the dome for a servo. iff you wanna use the jd ontop the six.(turning waist)

There may seem like there is a lot of room but believe me, with the servo wires, camera cable plus any extras added that space is soon full up. Not to mention the EZ-B takes up part of the space and needs something of an air gap for ventilation and to allow the cables to avoid being crushed, kinked or trapped.
hi rich
i was thinking off making extra space on the dome.
Yeah, not enough space, for a reg servo but maybe a micro, and then again that's pushing it.. I'm putting two bodies together to get more room.. the secondary body will whole a full servo and six will be much longer..
miniservo is not strong enough to carry hole body whit arms. maybe make the dome higher.
@nomad... can you put the servo in JD's body instead? Attach it upside down to connect with Six's dome?
rr
there is no room in jd body.choulder servo are in there.
Well JD's body at the bottom has 3 female slots, (left, center, right) and six has one female slot on the top, so to add a rotation servo you would need an Extension Cube to attach to the bottom of the rotation servo so you end up with 2 male ends (because the rotation servo has a female bottom) to join the bodies of JD and six together.
Or design a taller six shell so a rotation servo fits inside.
hi justin
yes a new design is best ,