
smiller29
DJ or anyone else, I have a few questions based on my limited knowledge of ARC. The one thing I have learned about ARC there are many places where you can add scripts and many ways to make things work. With that said I am working on a Biped robot project and at a point I want to work with Auto Position (Gait) skill and the MPU6050 skill. I understand the concept of how both of these skills work so let me just jump to problem/question.
Problem: I want to add stability logic within the movements of the auto positions and also when no Auto Position frames or actions are actively moving.
So I think when not moving AutopositionStatus = 0 I can just use a looping script in the MPU6050 skill to look for conditions that will trigger Auto Position frames or actions. But when using the Auto Position skill I need to add scripts within the:
Auto Position Start Script This script will be run before a frame or action is executed.
Auto Position End Script This script will be run after all the frames or actions in the queue have been executed.
So one question is should I stop the MPU6050 looping script in the Auto Position Start Script and start it backup in the Auto Position End Script? and at the same time add login stability logic in the end script before turning back on the MPU6050 script?
I am just looking for the best place my code within ARC so if anyone has done this and can provide more insight please let me know.
Related Hardware (view all EZB hardware)


I moved this into its thread because it's a larger conversation that doesn't entirely involve the auto position.
So, this is an interesting question. The main trouble seems to be that the moving of servos from an imu and the Auto Position will always conflict. I had thought about this before but did not see an easy way around it. Let me expand on this a bit...
Let's assume this is a biped robot that will walk.
My initial idea was to suggest modifying the offset of the hip servos by an imu script. This way, if you program the robot to walk on flat ground, the upper torso will always attempt to maintain an upright position. This is also called an inverted pendulum. The Auto Position will continue to run, but the imu will modify the offset of the servo, which the Auto Position never sees. So the Auto Position would move into position 90, but if your imu script has an offset of +1, it's actually in position 91, but the Auto Position still thinks it's 90. This is how the servo Profile works. The same function could be used to do that. You can't programmatically adjust the servo profile, so I'd have to make that into functions.
You could also adjust the ankle as well. Well, technically, you can adjust all the servos. You'll need quite a bit of math to make it happen. Essentially, you'll calculate an IMU error and adjust the servos to compensate for the error. A complementary filter or Kalman filter would need to be used.
The approach would sort of work, but one crucial factor to consider is the speed of servo angle correction. I do not believe this should be done in ARC. I think a controller should sit between the EZB and the servos containing the IMU. This is because you need the error calculation to be as accurate as possible, which means a very fast sample rate and response.
The trouble between the sample, process, and response is crucial. Otherwise, you're attempting to compensate for the difference in the error, which will amplify the error and cause a feedback loop.
Have you first tried one of those cheap Arduino inverted pendulum (balancing robot) kits to experience how this works? I've spent some time on this because back at ezrobot, we had tried to make an inverted pendulum module to do what you're describing. The problem was too many variables to be design/hardware agnostic.
So, in summary, I believe you will need closed-loop hardware that contains the imu, takes servo position requests, modifies them for the calculated error, and outputs the new servo position. Technically, this can all be done in an EZB for Arduino. But it's going to be very specific to your configuration/design.
DJ, Thanks for your insight on this and the challenges faced with it. I know I will most likely not be able to provide a complete perfect solution based on your feedback, but if I can get a better idea of how things work in ARC maybe I can hack a kind of solution together.
So my first question for you I need confirmed is:
The Auto Position Start Script and Auto Position End Script runs every time frame or action takes place? Meaning if you have an action that has 10 frames the Auto Position Start Script and Auto Position End Script runs only once and not for every one of the 10 frames? Can you confirm this is correct?
I have thought about using the MPU to also control the Hips and Ankles for side to side stability to a point before the the script would kick off a Auto Position action to kick out a leg and any other movements needed to stop it from falling over. Same kind of concept you used to make JD do to standup he was on his back.
But I agree the key is going to be making sure the MPU script is not in conflict with the Auto Position actions.
Correct me if I am wrong I would think that I could have more that one script that using the MPU output Var's.
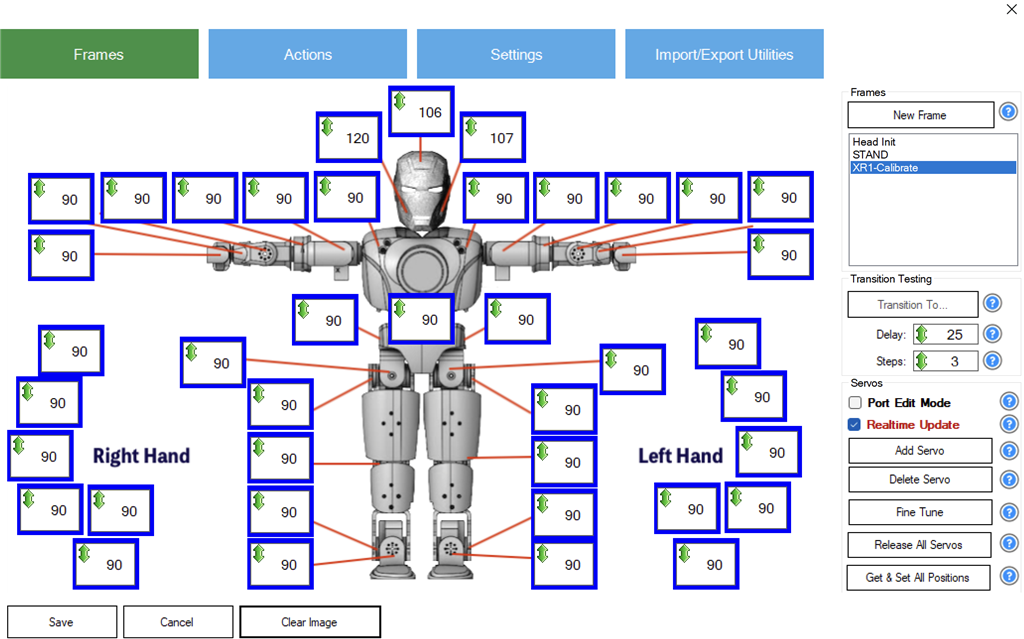
The following is a look at the legs for this project. The rest of the upper body will also need to be factored into the needed movement for balance but for right now I am just focusing on the leg movements.
Hmm, I wouldn’t recommend using the Auto Position start and stop script. Maybe instead have a script running at all time in the background in another control.
for things like summersault and such, the script can use IF conditions to check if it should bother keeping balance.
so yeah, what I’ll do is add the offset function in the next build of arc. That way, you can always keep an offset for the body to be upright from the imu, even when the Auto Position or other scripts are running.
Wow that would be nice thank DJ!
So if I went with a script and wanted to skip processing while the Auto Position Skill is making movements I could use the $AutoPositionStatus correct?
Question can we also add offsets to the MPU skill so it can be calibrated like you can in the Arduino code? See Below:
I have used this to help adjust the MPU in Arduino code using the MPU6050_6Axis_MotionApps20.h lib. I am not sure it is needed with your MPU skill.
The skill is "MPU6050 Accelerometer Gyro Temperature".
The above code allows you to calibrate the MPU because every MPU different so this can help zero MPU.
smiller29, You do great work,
ever check out James Bruton https://youtu.be/vGV42NZpT34
He has many videos on his YouTube channel on this.
just a thought, be well.
You keep mentioning placing scripts in the AutoPosition skill. Mainly the AP start and stop. Then mention that you're worried about this script running darning several frames. You may already know this but inside the Action section of the AP you can add scripts to each of the actions you've made if desired. Also you can drill down deeper and add a script to one or more Frames that went into making an Action. To add a script to an entire Action there is a button at the top of the frame list window on the right side of the Action section. To add a script the any Frame in that list, highlight the frame you want and click on the Edit button to the right if this list.
I know it sounds like you're now moving in a different direction but I though this may help somehow.
Cheers! Keep having fun!