jetpilot96
Switzerland
Asked
— Edited
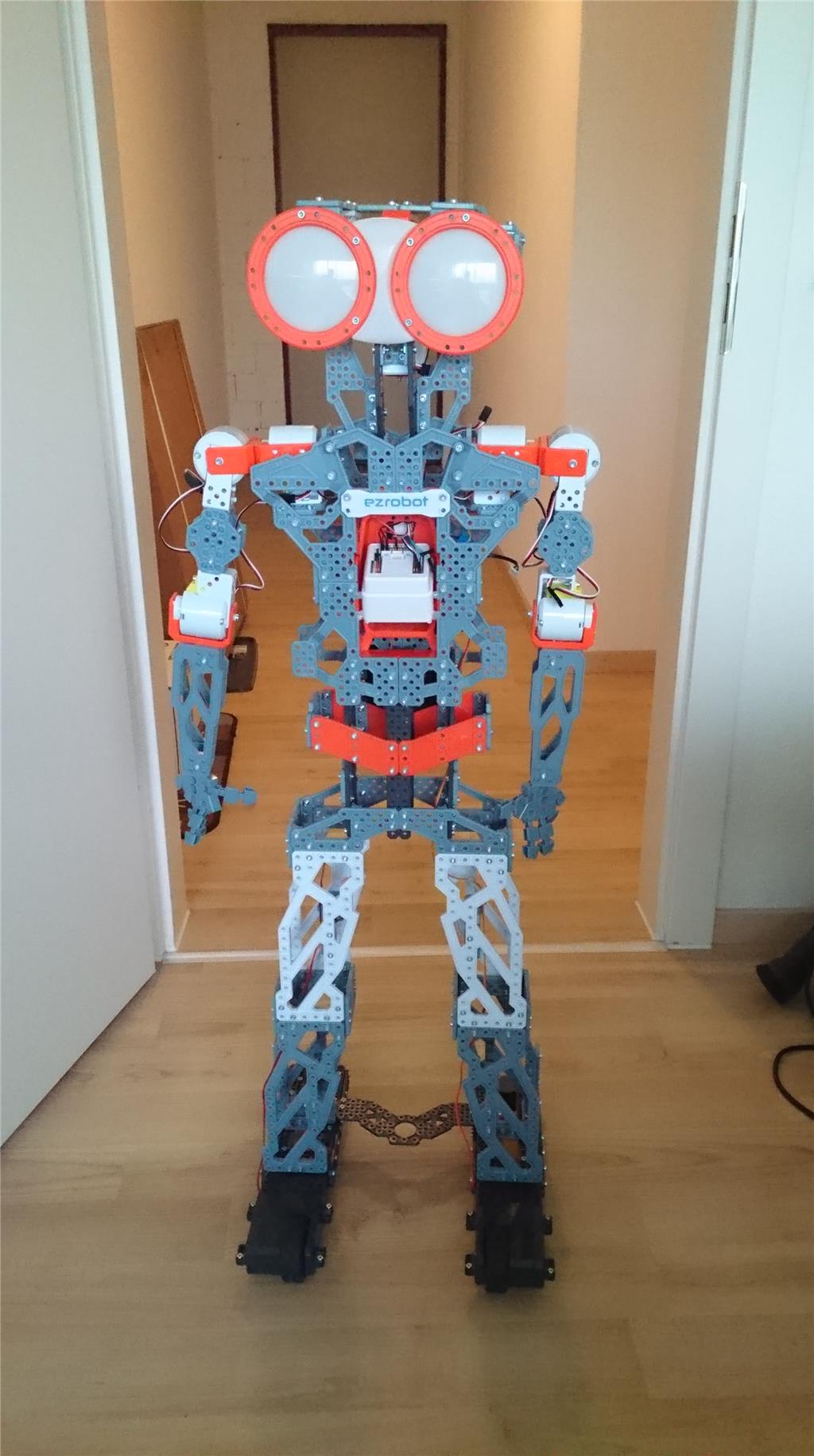
Meccanoid Becomes Eznoid
Now, finally I got it working (with help of DJ) 
 UBTECH Alpha Servos UBT-12HC
— Control UBTECH Alpha UBT-12HC smart servos via ARC using EZ-B v4/IoTiny UART, assign virtual ports, set baud, custom bits and position mapping.
Try it →
UBTECH Alpha Servos UBT-12HC
— Control UBTECH Alpha UBT-12HC smart servos via ARC using EZ-B v4/IoTiny UART, assign virtual ports, set baud, custom bits and position mapping.
Try it →
Now, finally I got it working (with help of DJ)

That's awesome! Very clean build as well. And boy, that was fast
Now what is on the list?
If you'd like to use the Auto Position with those servos, i can help you with that.
Because currently the servos only move when the command is sent via the UART. If you want to map those servos to Vx (virtual servo) ports on the softwar, then you can use regular servo controls.
Thanks:-) will think about what next steps will be.
nice video would be great.
@JetPilot96 - very nice build, congrats! Looks like you are using the standard meccanoid 6.7V power supply, can I ask what sort of battery life are you getting between charges?
@DJ - I haven't had a chance to glance through the code yet, but a few questions if I may:-
is it possible to read the current servo position? And if so based upon the discussion above would pull up resistors be required for that? (And thirdly would the inbuilt pull-up resistors of the arduino be sufficient if so?)
the meccanoid 'eyes' use an rgb led as one of the "servo's" on the neck chain with 256 values per Color. There is no servo mechanism attached to this but is addressable the same way a servo is. Is there a way for EZ-B to set the Color of the eyes? (The neck chain consists of 2 servo's (1 for Lan, 1 for tilt) with servo led's which can be set to 8 intensities of red OR blue OR green, whereas the eyes led has no servo but is an led which can mix up to 256 shades of red AND blue AND green)
is it possible to include a ramp time parameter to assist in servo speed? The default snap speed is pretty fast. (I know could be done within EZ-Script with a looping function, but would be a nice addition to the library)
Prior to converting to EZ-B I was using the firmware for arduino provided at meccontrol.com - the addition of these 3 items would replicate the functionality of that firmware providing full access to meccanoids hardware. Then with all the other wonderful features of EZ-B and ARC this will finally be a robot instead of a toy
Sorry for all the questions/feature requests, but I'm really excited about this (and wanting to make sure I order all the right gear in one go to minimise shipping costs).
Thanks!
nice video
you can set the speed of your motion slower,standard is speed 25 if you go higher excample 35 or 40 the motion get more smoother.
Congratulations ! Nice work.
for the once thinking about converting it to EZB
It is challenging the get it working, but if you like to use the robot, you better convert it to normal, stronger servos.
@ Aceboss 1, see above 2, Eye colour can be changed (via arduino, see video) 3, via Arduino limited possibilities as the communication is the bottleneck, if you send too many commands/ too fast, "smart?" servos behave strange
I have tried to communicate directly EZB to "smart" servos, but coould not establish reliable communication
Jetpilot, do you need assistance on a script to use the ARC servo controls? So you can take advantage of the camera tracking or auto positioner or wiimote or joystick etc...?