Asked
— Edited
Johnny Five Robot Build
My name is Terry Andrews Jr. AKA, the "J5GURU" from Input-Inc. Already purchased this controller "ez-b v4/2" and Camera for possible use in the Johnny Five Robots for the worldwide "J5" community. Need to communicate with someone "DJ Sures?" that can answer some broad questions as to weather this controller is up to the task and if so, what it will take to make it happen. Prefer video chat Via Skype. Please Email me [email protected]

Figured I would add some specifics so everyone can see what the Johnny Five's minimum electro-mechanical system requirements are. Also requires Microphone input and Camera.
Represents fully loaded Johnny Five build, No functional Tool-Arm. That is a "static only" display option!
Total Servo, Actuator and PWM signal count =52
Total Lighting Count =12
Total Audio Count = 3
HEAD;
Radar Dish servo X2 Microphone servo X1 Whip Antenna servo X2 Eye Pop servo X1 Nose Rotation servo X2 Nose Basket servo X2 Eye Flap upper servo X2 Eye Flap lower servo X2 Eye L/R servo X2 Eye U/D servo X2 Eye Iris servo X2 Eye Vent servo X2
Total Servo's= 22
Audio; Speaker X1
Lighting; Neopixel Ring X2 Ambient light source X1 Power Pole Detail X1
Neck & Upper Torso;
Head L/R servo X1 Turkey Neck F/R servo X1 Head Tilt Drive servo X2 Torso U/D Act/Servo X1
Total Servo's= 5
Lighting;
Lip Lights X1 Tracking Beacon X1
Laser;
Deployment U/DServo X1
Total Servo's= 1
Lighting; Pre-fire Targeting X1 Laser Firing X1
Audio; Speaker X1
Arms;
Hug servo X2 Shoulder servo X2 Elbow servo X2 Wrist turn servo X2 Wrist U/D servo X2 Fingers servo X6
Total Servo's= 16
Lower Torso;
Waist L/R Act/Servo X1 Torso U/D Act/Servo X1 Display Door servo X1 Battery Comp. servo X1
Total Servo's= X4
Lighting;
Console indicators X2 Console display X1
Audio; Speaker X1
Cradel Base;
Track Tip Act/Servo X2
Total Servo's= X2
Track Drives;
Speed controller, PWM X2
Total Servo's= X2
Created by, Terry Andrews Jr. June 3 2018
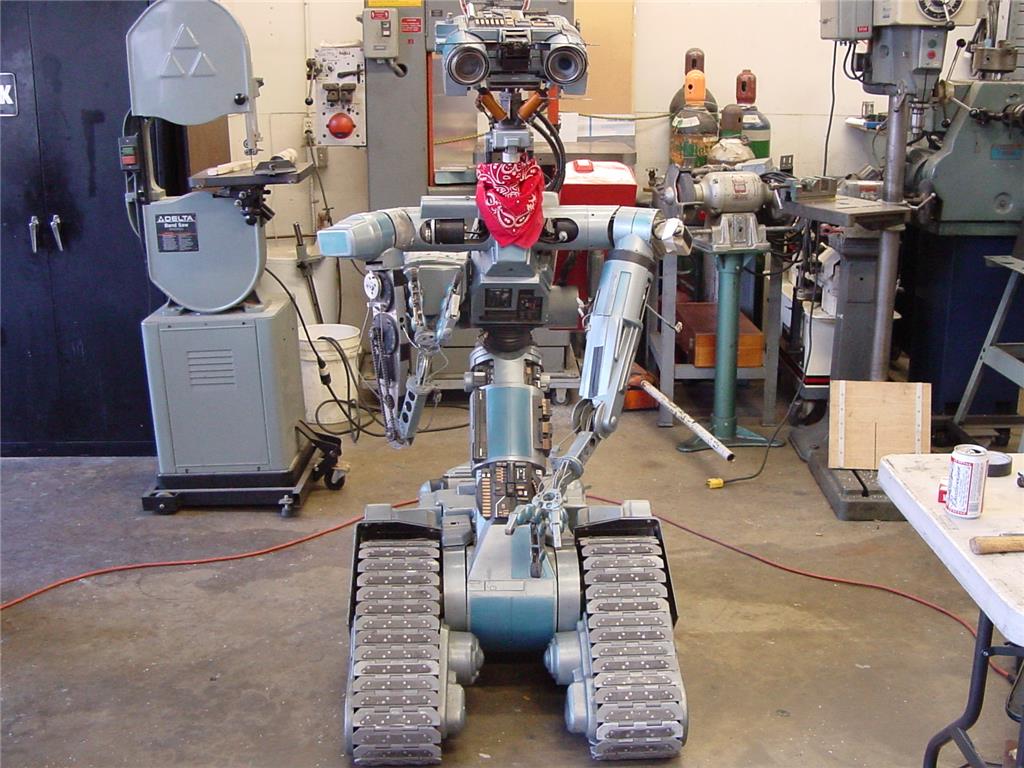
How long did it take you to build him? Are his outer shell pieces metal or 3d printed. is he actually mobile?
That particular picture is of the Actual 1986 and 1988 (#5) Johnny Five movie Robot I documented in 2004. We are in the process of building re-engineered and designed versions. It will do it all and hopefully the ez-b controller will be at the heart of that! Here is a link to our Teams FaceBook page. https://www.facebook.com/inputinc/
Here is a link to my YouTube Channel....Lots of Input! https://www.youtube.com/user/J5GURU
Thanks, Terry.
Hi @J5GURU, Very cool project! I feel like we were just talking about Johnny 5 recently!
If it helps at all, you can access the EZ-B v4.x Datasheet & Communication Protocol and further details.
@J5GURU, a big welcome to the community Terry! I'm a fan of your work and youtube channel and facebook page. I think you'll find a lot of other helpful community members here.
If you have not had a chance to take a look at the learn section yet, I think you'll find the "EZB v4 & ioTiny" courses helpful because they'll give an overview of both for more of a DIY prospective and as you use the EZB it'll helpful to refer back to the information from those quick videos.
"The Robot Program" from the Learn section will probably be something to check out later on because there are lot of neat how to videos that cover making a robot dance, talk, track and object, etc and since they focus on the controls used in ARC and code examples you can really take those lessons and apply them towards any robot.
If I were in your shoes I'd probably want to know how to take the EZB and get started and like you said, is it up to the task of controlling everything in your J5.
My short is, it'll be up to the task, but not alone. Because the EZB only has 24 digital I/O what other community members do with large robots like B9 replicas or Inmoov androids is add additional EZB4s or ioTinys to their projects because you can have up to 5 mix and board in a project.
I think another big question might be is do you plan to have an onboard computer inside the J5 or not? Because that might direct some of your design choices.
Impressive robot and workshop too. Congratulations and welcome to this forum. DJ will most certainly help you out with your questions, but I'm pretty sure the EZ-Robot controller is able to take care of your needs. I love your work and ingenuity !
Sweet! Awesome build!
Hey Terry,
Cool work. Johnny 5 can do more than dance!
Question: Can the EZ-B v.4 handle my project? Answer: Yes. The Ez-robot platform can most easily handle your needs. One unit could do it if you're using Dynamixel servos or perhaps 3 units if not. Where it shines is you have to processing power of a PC that can handle all your CV and AI needs. That stuff is magnitudes more complicated on other platforms.
The only thing I've been unable to do are inverse kinetics but that was on the Version 3 board where there was too much of a lag in the PC to board interface. Johnny has will have no trouble standing on his own two feet.
Here's the spec sheet: https://www.ez-robot.com/Tutorials/Files/EZ-Bv4%20Datasheet.pdf
Best,
Bill Scott