
csa459
USA
Asked
— Edited
Ive Notice Something Wierd
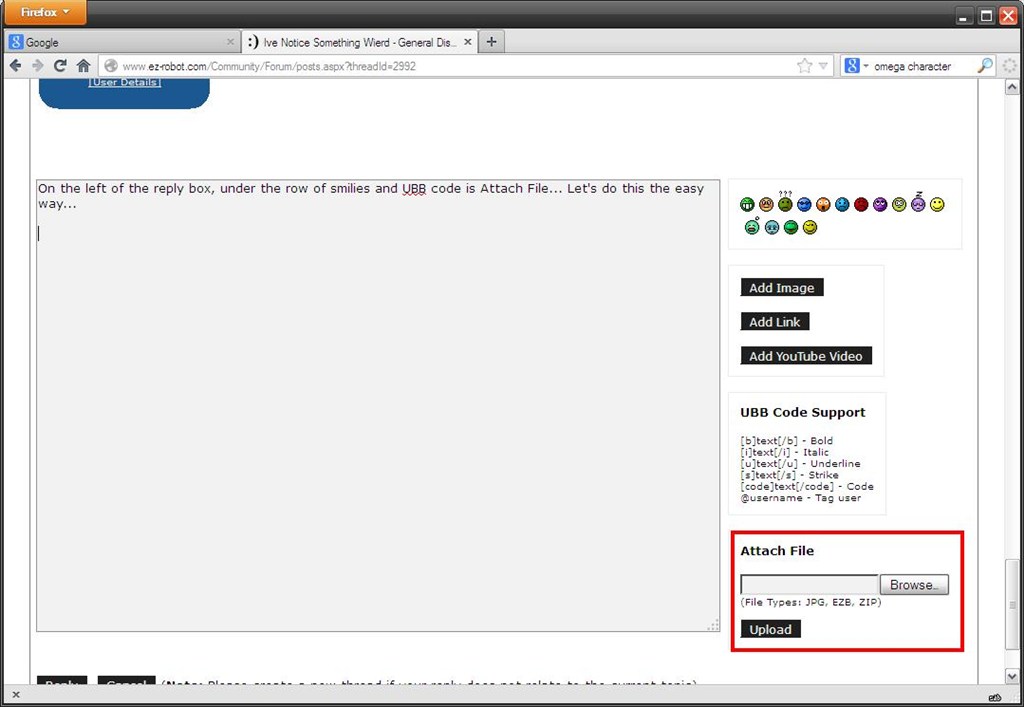
has anyone have this happen , after shutting down the power to ezb board .then power up again . when seems good i give command to look home .and servos move fast in wrong way then come back slowly to home position . then everything is ok as long i dont unplug battery pack.

I assume it's because the servos don't know their position when you first power them on... I might be wrong on that though
ive try everything i can think of , its like wierd
I have the exact same issue. I have a script at connexion which move some servos to a defined position. If the script is launched after a shutdown/power-up, the servos go crazy and move suddenly to an unexpected position, then they go to the defined position in the script. If I just disconnect the board and reconnect it (no shutting down), there is no problem... I am also puzzled...
i think we need dj opinion on this too
I have just tried again and observed carefully what happens. It seems that all servo try to go to position 0 before going to the expected position... and as none of the servos is able to go to 0 (limit is more around 10-15), it gives a strange and scary result. I agree, we certainly need DJ expertise...
yea i see the same going on fully max on servo, then it goes to the position i told it to got too, DJ we need you it cause my robot to bracket the come lose alittle its like whip lash. when it rotate the neck.s.
it cause my robot to bracket the come lose alittle its like whip lash. when it rotate the neck.s. cory
cory
I don't know how that is possible. Post your project.
@DJ, I am at work now (time difference with US ) but i will post my project when I am back home. Thanks.
) but i will post my project when I am back home. Thanks.