
Kridge
USA
Asked
— Edited
Inmoov Bicep Servo Question
Hello all! First of all I want to thank all of you for your support with inmoov/ezb. It has been very helpful to me to this point in my build. I was wondering if anyone has used the ez hdd servos in the bicep and if the pot hack is still necessary with this system? I'm having a hard time bringing myself to busting into brand new servos. Just curious if there are any other avenues i can explore. Thanks

Kridge, I used the HDD servo for InMoov’s biceps. I didn’t remove the pot but modified the worm pinion to give it more range.
I did a video of the bicep action on this forum a while ago, I’ll try to find it!
Here’s the video.
https://www.youtube.com/watch?v=bySzD2kxSSM
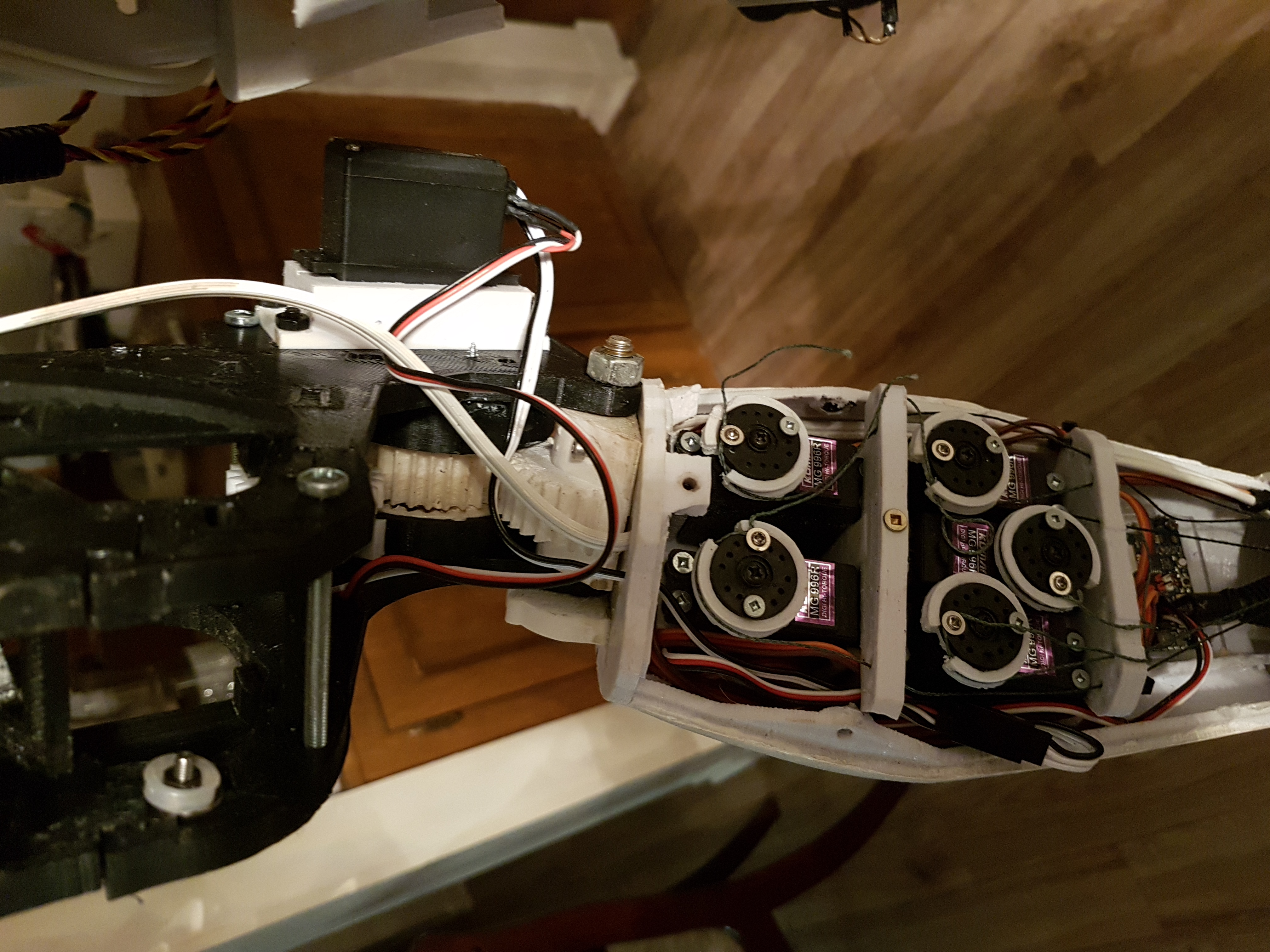
@Kridge I built two inmoov robots and there are quite a few servo that need to be modified, just take your time and be carefull, with Bruce-e my last inmoov robot I used aerius's design for a planitary gear elbow. my advice is to print the gears with 100% infill and high detail use ABS or Nylon as the weight of the forarm puts a lot of stress on the planitary gear, this elbow uses an ez-robot hd regular size servo strong and less expensive but you still have to remove the pot and the pin on the main gear, easier to do with the EZ servo. Bruce-e can now touch his head with his hand. If you want I made an inmoov hand that is easy to adjust. I am thinking of making a video showing this. here is a picture of Bruce-e's elbow. notice there is an iotiny in each forarm no long wires to the body.
@ Kridge , Opening up a servo and removing the pot is easy. Take some pictures for reference after each step, like when you remove the base or when the gears are exposed.
If soldering isn't your thing then you can cut and splice the wires or better yet, get a good crimping tool and install a plug. Crimper kit
After you do one you'll get the hang of it. Take an old one apart first and you'll see how simple they are inside.
The Bicep servo has to rotate more than 180 degrees that is why the pot has to be removed.
I am currently waiting on some more servos to arrive so I can continue my project. I guess I will bust into a couple when they arrive. @nallycat how is that planetary gear elbow working for you so far? I have been looking into it but from videos I've seen the movement seems very strenuous on the servos. I'm also interested in the hand model you mentioned, as well as any other derivatives that anyone can recommend. I've been doing industrial robotics for a few years now but this is my first solo project including smaller scale servos so I'm kind of learning as I go. I may go ahead and order the hs805bb's for the little extra torque but who knows. I appreciate all of you.
Here is a picture of my 2 thumbed hand. Did you want the file?
I also have a forearm that spring loads each servo (fits EZ-Robot servos) so there is no slack in the cables/tendons. They are self adjusting/tensioning.
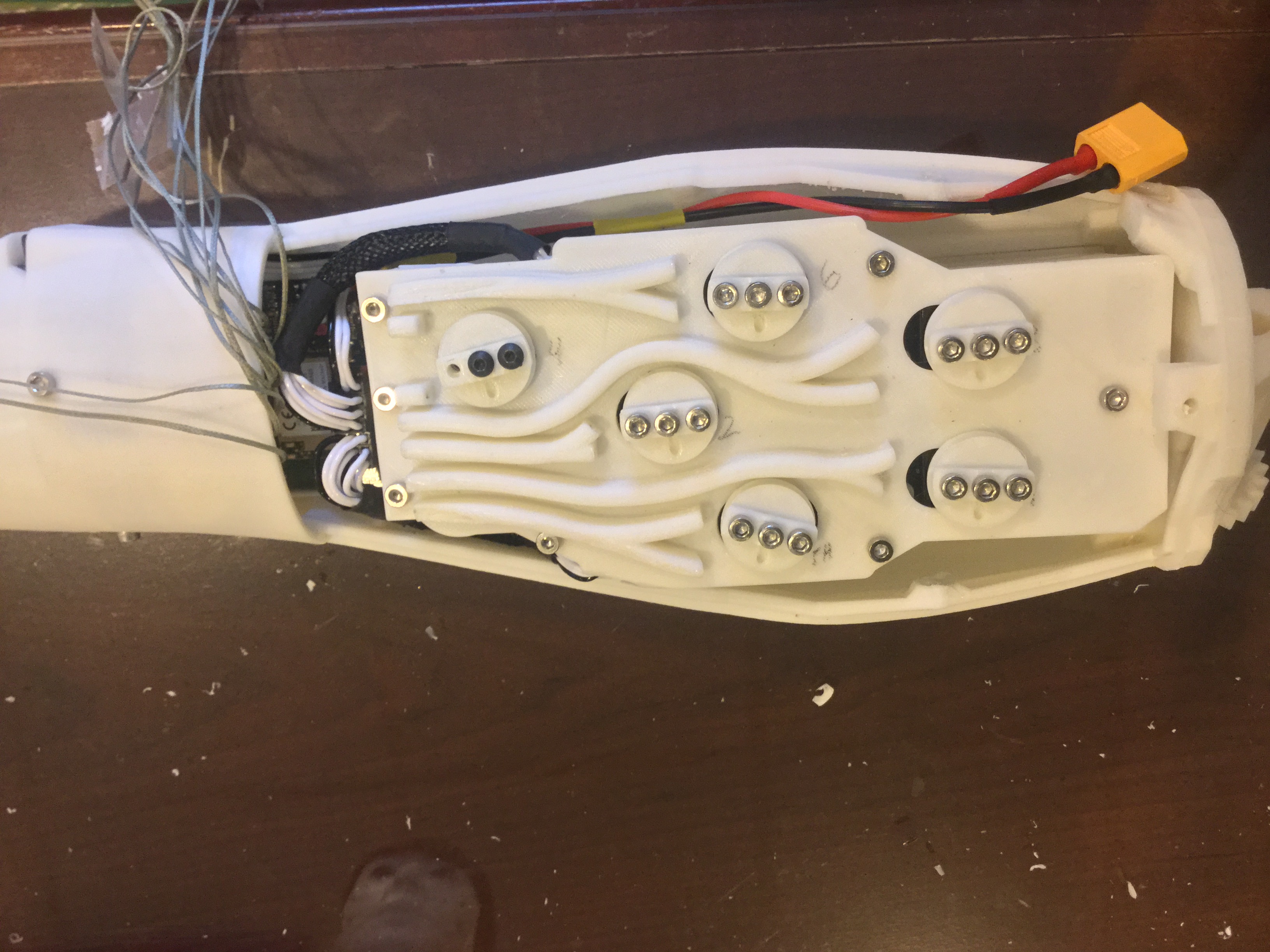
Here is the Forearm