Asked
— Edited
Inmoov Heavy Head And How Do Other Inmoovers Cable Their Robots?
Hi everyone Very interested in how you all approach the InMoov arm wiring and hiding the cables between arms and torso. Very interesting how you wired it Merne.
Also I have the speaker in the mouth and find that head settles forward on power down and tends to pull the neck out of the neck socket [bob houston style neck]. have a great weekend lorn

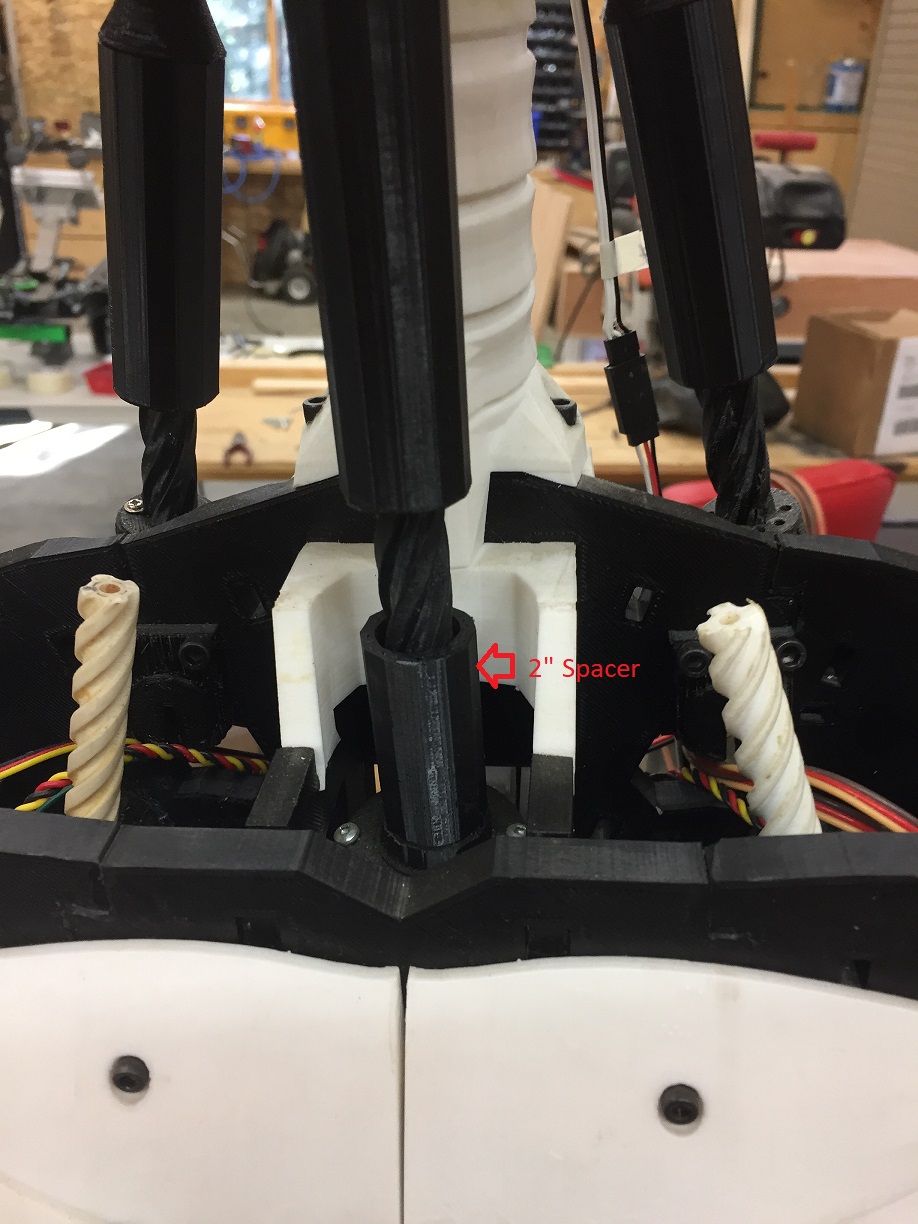
Hi there, I know it's been awhile... I also went through all the iterations of neck on the InMoov starting with the original Flex/Extend/Rotate then moved to Bob Houston's neck, then made mods, then built Drupp's Parloma neck. I've designed a two servo lead screw driven neck that provides precise control over head position and fits into the parloma neck footprint: https://www.thingiverse.com/thing:3781132
Enjoy!
This is very interesting, I have built the Drupp Parloma neck design on my InMoov a few years back.
What advantages does this new design have over the parloma neck design?
Control over the head is more precise and certain. There is too much play in the parloma neck, and mine developed slippage in one of the gears. Tracking is more easily facilitated. Active range of motion is increased. See initial video: https://youtu.be/R95s6OxsMGg
Thanks, I might have a closer look at your design and give it ago. Although I hadn’t experienced play and slippage, there is a lack of range of motion as you have highlighted on the parloma neck design, which has bugged me for a while!
I like your YouTube clip.
I use Gael's neck design it is like Bob Houston's design but I like it better, I use ez-robot HD servos and I have no issues with movement or head dropping. I print the neck gears with nylon and the other parts with PET G. I use an IO-tiny in each wrist to control fingers elbow and shoulder servo's so no wires leave the arms. no long wire runs just a pos and neg power wire. to the torso. cool
@nallycat - What a great idea! Got any photos of mounting and routing cables to the ioTinys? ARC supports five boards - I have 3 right now.
None of the past necks really performed to my expectations, hence the new design. Plus, I love a project. The linear drive mechanism provides excellent fine tuned control over head position.
Thanks!
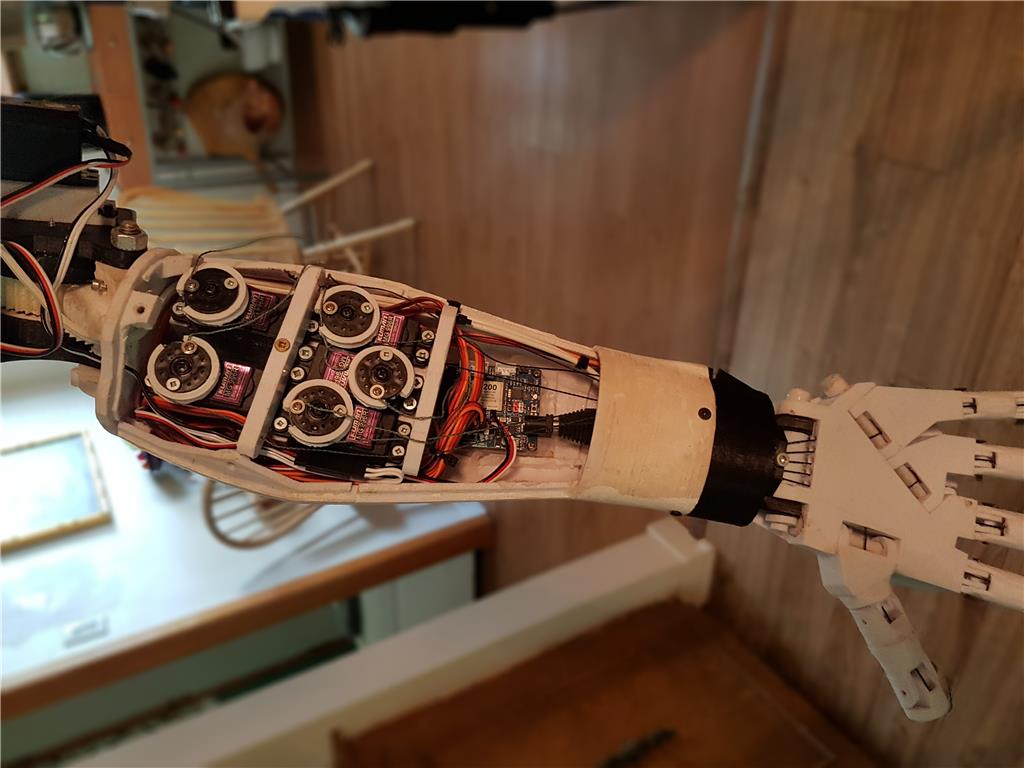
@mayaway I took these pictures to show you the Io-Tiny locations one in each Wrist. you can see no wires going to the torso. except the power, also you can see the elbow is Aerius design and it uses only a EZ_ROBOT HD servo to raise the arm, I advise if anyone is going to make this, make all the gears out of nylon filament as I had PLA break, ABS and Pet -g flexed to much and the gears slipped under load .Hi all Great idea with the IoTiny in the arms.