
Asked
— Edited
Inmoov Heavy Head And How Do Other Inmoovers Cable Their Robots?
Hi everyone Very interested in how you all approach the InMoov arm wiring and hiding the cables between arms and torso. Very interesting how you wired it Merne.
Also I have the speaker in the mouth and find that head settles forward on power down and tends to pull the neck out of the neck socket [bob houston style neck]. have a great weekend lorn

Damm it. I just wrote up 3 paragraphs only to hit the wrong button on my phone while uploading pictures and lost all of my typing I put in, flower iPhones? stress
@Lorn, Second try, lol
I used 14 pin flat cable and servo cables both work fine. I ran all my cables out of the forarm then up thought the biceps out the back top of the biceps where the back bicep covers attach. Then were the servo for the rotcenter(arm rotates) attaches to that part there is a square hole is were I run all my cables thought.
Then I run all the wires, though the slots on the back side of the pivconnector(s) the runs/lays between the top torso part except the rotcenter wire that the servo attaches to outside that will run though the square hole on the servo pivmit( the part that rotates the arm up and down. This wire then goes on the back side of the torso to my EZB controller.
The pot that controls the shoulder Pot runs outside up into the other wires then though a slot on the torso to my EZB controller too. Make sure to leave a little slack and all the cables for movement of the parts.
For the shoulder servo wires I run them up in between the shoulder holder back on on top of the torso with the other wires going though the slot on the toros to the controller too.
As for the neck moving down when the servo power is released, we need to as bhouston and anyone else who uses Bob's design. I use Mr. Drupp's neck design, I find it look more like a neck. I think Bob has done a great job of several modifications to the Inmoov for our community but I like Drupp's neck, personal preference
You might have the neck position part to loose or not a strong enough serval to hold his position when there's no power to it hope all this helps.
Cheers
Edited Ohgreat, now Bob's gonna be mad at me for not following his tutorial on uploading pictures sorry Bob. stress

@Lorn.
Forgot to mention, all Inmoov builders wires their's a little different so you might want to see if others share their wiring experiences.
Hi Merne Great pictures and very nice InMoov. And thanks for taking the time to write it [twice!] I am going to rewire same routes as you have done, to keep it all tidy.
I think the problem I am having with the neck [which has only just started to happen since I finally got around to fitting his skull top/side plates and ears in place] is both weight and the round cup over the ball joint wearing out a bit. So its not properly gripping the ball joint. Tried tightening up the servo linkages, and even thought about adding weights at the back of the head to hold it in place.
I am planning to print the Drupp neck when my new printer arrives. Everyone keeps saying I should try it. My Wanhoa i3 control board failed again so I have ordered a new original Prussa Mk-2S printer so just waiting on that to arrive.
I had almost finished printing a new arm to fit the flexi-hand modification to, so thats yet to be completed totally. Also am planning on printing another head, so lots to keep me busy.
Also must get a voice BOT working! Oh and a new stand for him... Have a great Sunday Lorn
Thanks Lorn. You could try a spring in the back of the head to help keep it in place for now until you get Drupp's neck complete.
Hi Lorn, I have seen somewhere somebody had a spring that fit around the piston that raises the head. It was about 2 cm dia and 5 cm or so long.
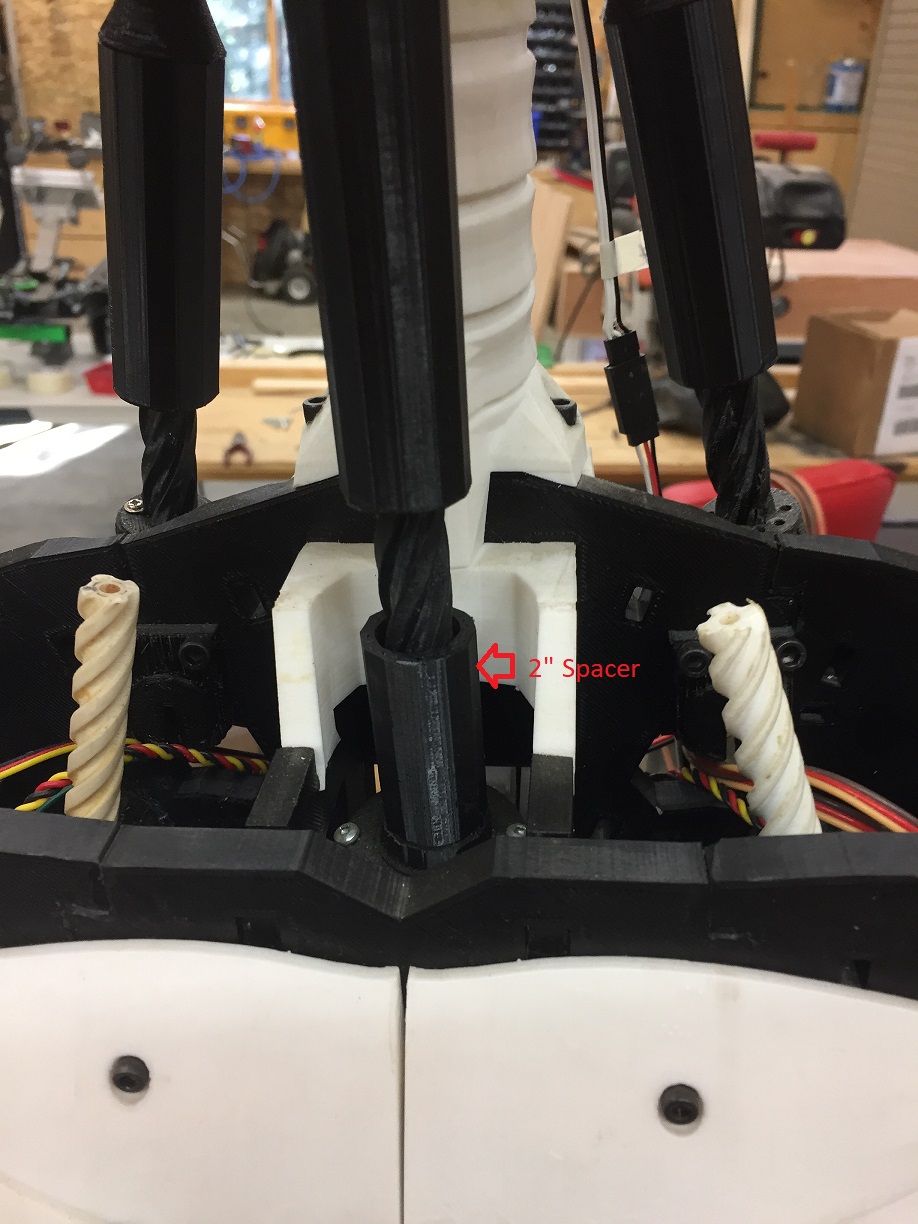
@lornecampbell, I've put a 2"spacer on the piston that lifts the head so that it can only go down so far. This will prevent the neck joint from pulling off. The spacer is made from 2" of the ThroatPistonBase. Cut off the end that doesn't have any threads in it. Also make sure that ball joint fits tight. I put some grease it as well. Hope this helps.
Hi Lorn, Look at post # 100 under my Inmoov project,
https://synthiam.com/Community/Questions/7706&page=10
It show the spring i use to hold the head straight when the servo is release.
Hi everyone thanks for all your comments and pictures. I will mod the neck and that looks like it will sort out the problem. Plus my new printer should arrive this week so I can get 3D printing again. Lorn