robotmaker
I buy a lot of NEATO XV-11 ROBOTIC vacuum cleaner and take apart and sell the parts mostly the LASER
A looking at the idea that DJ uses to control IROBOT ROOMBA with serial and it can be done the same way.
FEW hack sites has info on the serial commands and they have it controlled by another computer
NEATO XV11 if you read the many reviews on it ,its a lot better then ROOMBA ,one main reason it uses a LIDAR tracking system ,where ROOMBA uses a IR BEACON system
SO it will make a great robotic base,used ones on ebay are about $100
MAY be latter DJ can make a Movement Panel for it,but for now it can be controlled by serial using scripts.
LIKE to hear any good or bad comments on it,and will be looking at the code soon, do need to open it and solder wire to ground and TX line.

Actually the Roomba does not have any type of navigation system. The IR sensors are for cliff detection, virtual wall detection, Light touch sensor, obstacle sensors, and remote control commands.
The Neato control commands are documented on the NeatoRobotics.com website. I looked at this robot for use with the EZ-B system but since the Lidar component cannot easily be controlled all you can do is basically the same commands that would be sent to a Roomba. There is no way to take advantage of the Lidar function within the Neato and incorporate it for use by the EZ-B. Possibly in the future something could be done using a bluetooth wired to the Tx and Gnd on the Lidar unit to build a room map.
You will have to stay with the early versions of the Neato XV-11 with a (rev 113 circuit board) since later models had a newer (rev 64 circuit board) that did away with the comm port.
When you do get around to opening one of the XV-11s you might want to use Gnd and Rx since the commands will be sent to it from the EZ-B.
I must of open more then 100 neato xv- 11 and i know about the comm port not used in the new board
I will post a few hack sites that has a lot more info on api codes and more,and i know the guy who won the bounty on hacking the neato codes
And i know about the codes on the neatorobotics website they put that info up after it was hacked N ot very much info as the hack sites has,and i bought a few neato LIDAR control boards to give usb output and speed control,but all you need is usb to ttl converter and special time circuit to give 300 rpm,very easy to make
so many different ways he has on hook it up ,like using a chumby internet screen and using the neato lidar sensor WITCH IS ONE OF THE BIGGEST item i sell on ebay the most and i have one working on LINUX ROS software
And about roomba its not really navigation the IR beacon are to home-in on home base and virtual wall beacons
I also sell LOTs of Lidar units and drive wheels for Neato owners but that has nothing to do with hacking the Neato using the EZ-B.
The Roomba does not navigate. If there is no home base nor Virtual Walls it still manages to clean the environment it is placed into.
YES it doesn't add it for others to buy my neato lidar like a few from this place did there is a home base that uses whats called a omnicone and IR receiver and a IR sender VIRTUAL WALLS are so that the roomba doesnt pass a certain area
AND roomba doesnt do a great job of cleaning bad navigation software,it needs some type of navigation or it just cleans in one area,sensors mostly for furniture and other objects in its path,for dirt sensor it uses a type on sonar pickup it has a metal copper plate that sends and receives a sonar pulse.
But this post is mostly about neato xv-11 has a lot better navigation system then roomba and using serial i should easy make code for it,if not i have a friend that is very good in coding
ALSO THE LIDAR used on a neato xv-11 it almost compares to a lidar at $1200 ,accuracy and there is data on both of them on the hack site
pretty soon i might be able to get schematics for the neato xv-11 from the neato company ,they said i just need a tax ID number for my repair company and they will send me a copy,they said no schematic on the lidar yet (rats) BUT i still repair broken boards or send them another one. so schematics might help in using EZB board ,like another idea i have remove lcd and mother board and use only EZB lidar is my only problem ezb CANT RECEIVE commands only send,but another idea may be is using I2C bus some how may be I2C bluetooth module
I know there are more expensive Lidar systems in the world. What I will do as well as others on the forum will be to patiently wait for the forthcoming coding to appear for the XV-11.
As far as Roomba navigation software, there is none. There really isn't a comparison since the Neato has and uses navigation software and the Roomba does not even have navigation software.
IT needs some type of navigation to find its way around in a room,have to ask this question on the roomba site you are a member of ,
I finally found a bluetooth to I2C and cheap receives and sends,and then use the ttl to bluetooth that EZB uses ,can be a master or slave $19.50 CHEAP it may work for lidar and other designs.
WILL have to read up on the I2C bus info and will try with something simple like serial lcd first.
Havent found a TTL to I2C adapter yet
ON THE CODING for the NEATO its already out there ,hackspaces,com is one ,another it neat hack wiki site,will find the links pages and pages of info on the neato besides the neato lidar
Robot-Doc you sell Neato Lidar and Neato complete?
I am also interested in the Neato Lidar systems :)
A dumb question regarding lidar on vacuums versus other navigation/collision avoidence devices. Why is a high degree of accuracy needed in a room? Is it to avoid thin/small table legs? In a room full of wine glasses on the floor would the lidar be best....enquiring minds? thanks in advance.
thanks in advance.
Better accuracy easy to map a room to avoid objects and better navigation ,can map of to a inch or less on some lasers Why do you think they use them for missile tracking and more
Of all the navigation type sensors lasers has the highest navigation,but there is drawbacks like with every sensor made
TROY AND IROBOT i sell them alot on ebay,biggest seller for me,mostly russia and france buys the most from me.
I SELL THEM for about $100 EASY on another company that sells them is $299 for laser and neatorobotics compant has it for that list price alSO
Second the accuracy is compare to a LIDAR (LASER) AT $1200 .i have a link to much data testing done on both and the LIDAR hack,this person did so much testing ,design and broke the api code ,hackaday and adafruit and sparkun put up a bounty and info for anyone to hack it and he did it.
Some other things about my testing of ROOMBA with NEATO ,XV-11 besides the robots getting a round in a room to do the cleaning that NEATO does a lot better,it has a much stronger VACUUM AND better wheel feedback
ON roomba is uses optical encoders that get dirty a lot ,where on the NEATO it uses a magnetic encoder
MOTORS on the neato are a lot better,with heat and design and stronger.
NEATO has a LCD FOR battery info and lot more, Price on them are about the same,
When making statements about the Neato and Roomba please include what model numbers you are discussing. The optical encoder reference is only used on the early models of the Roomba. Later models use magnetic encoders just like the Neato. Also the cleaning capability becomes about equal when you realize that the Neato only makes a single pass when cleaning whereas the Roomba makes multiple passes over the same area that results in more debris being removed from the cleaning surface. Also when using the 700 model gray CHM and the Aerovac dust bin, the Roomba (500, and 600) is a very effective cleaner. The 700 model Roomba with the HEPA filters is even better than the earlier model Roombas. The Roomba also has a color LED display for battery charge state. Roomba drive motors are designed to operate quite well within the parameters of normal operation. A lot of Neato drive motors have been failing and causing Neato owners much grief with the "My drive motor is stuck" error.
Thank you robot-doc. Ive learned a lot with just that short paragraph.
ROBOT-DOC you are right i should put the models in that i tested
500 and 600 SERIES uses magnetic encoders ,mostly taking about the 4200 series we use the EZB on uses optical feedback. YES ON THE STUCK MOTOR problem is now fixed with new motor design, stuck problem was because they use very high torque motors and they overheat causing them to get stuck,so they added a heat shield design and new motors dont have the problem any more.
BOTH NEATO AND ROOMBA has HEPA filters,not shore if roomba has a added a brush for dog hairs ONE REASON MY MOM sent the roomba back and 500 series are very high cost i think $500
I found that 500 and 600 are harder to modify to use as a robotic base.
4200 SERIES are very close the design of the IROBOT CREATE only with 25 pin DIN connector
I guess we both have our comments on witch robotic vacuum we like.
ON the cleaning it doesnt sound right one good reason NEATO HAS stronger vacuum I did a simple test in my moms carpet and tile floor
First on carpet i ran the roomba 4200 series it looked like it got cleaned,and then ran the NEATO XV-11 and it the bin lot of dirt,so it seems roomba missed it
ON tile did the same test and neato xv-11 had a lot dirt more then the carpet
IT seems doesnt do a good job on TILE and kinda ok on carpets
NEXT week will try the NEATO FIRST AND THEN ROOMBA ,
I think may be 500 series will be better then 4200 series and same as the neato maybe BUT at much higher cost.
BUT still the best point on the NEATO is the LIDAR it gives much better navigation and tracking . ONE reason robots use it a lot,only problem is that most LIDAR'S are $1200 and up So most use camera's and sensors
On the NEATO looking very soon to have info how to use EZB to control it using serial or bluetooth or WIFI The commands look and on ebay they go for use about $150 so it looks a like a very good choice for a robotic base
Also as a robotic base i found that the neato xv-11 can carry more weight then the roomba 4200 we use also I dont know about the 500 and 600 series .
ROBOT-DOC if you want to loan me the ROOMBA 500 OR 600 SERIES i will pay shipping back and forth for some test i would like to do.
I am very curious how it works out for me.you can do tests but i would like to run my own.
ROBOT-DOC i see you have thermal tape,where did you get it ? Since i need a big roll for a design i am working on,dont want a short piece that you are selling.
I am designing a temperature sensor for fans and for my fish tank and other stuff.
robotmaker, you can locate the thermal tape on ebay, lots of sellers. Also roundtrip shipping would cost more between Louisiana and Florida than what you would pay on ebay for a working 500 model.
robot-doc would not the shipping cost on the 500 model be about the same,plus i need to add the cost of the unit
MAY be a used one can get cheap,but hard to tell if its working good, i have the schematics on 400 series but not 500 and 600 they use a different size board
ALSO guys since talking about the neato xv-11 unit,i have many sensors i can sell for free or very cheap.
LIKE i did for REX ,like sharp optical sensors little like the ones we use only short range 8 inch inches, have about 90 of them may be more and small switches great for bumper contacts,and magnetic sensors
VERY high torque motor with feedback (brush motor)
I was able to get this scan from the Neato XV-11 today from the terminal program in the ARC and entered the data in Excel. I scanned the inside of a box which produced this Flat Land perspective: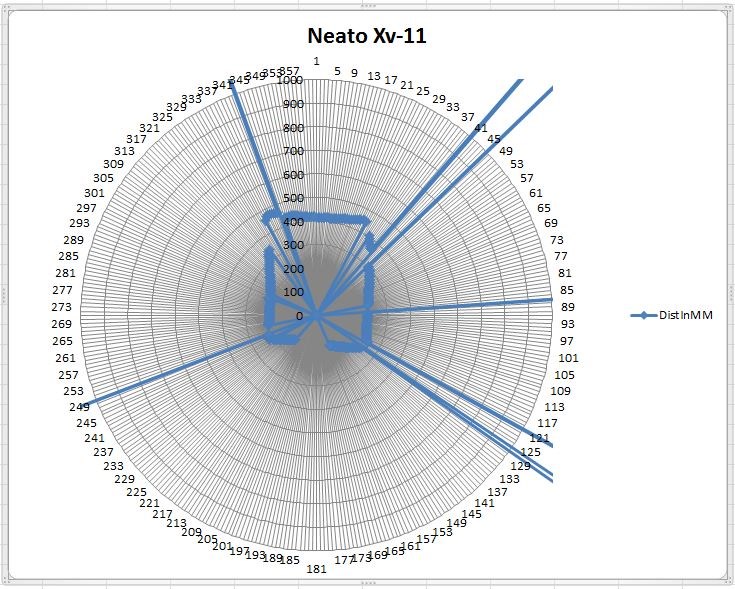
But I haven't yet found a way to read the data. I'm wanting to read Neato's Accelerometer z access as I raise it up to scan a room. I'll then store 180 of the 360 samples in an array with the z access. I'll then convert that data into a .dfx file for exploration in 3D.
I also plan to mount the entire robot onto my 4WD monster truck.
Any ideas how to send and receive data from the XV-11 and the ARC?
Here's a link to all the commands: Neato Commands
Here's a video of my methods so far:
Thanks,
Bill
RobotMaker,
Any luck reading the Neato Lidar data into the EZ-Script software yet? I would prefer to use a Neato Lidar unit taken out of a Neato. My wife would get mad if I sacrificed her vacuum for my robot.
RobotMaker is selling them cheap on ebay. ;)
The EZ-B and ARC can send serial commands through any of the 20 digital ports with the SendSerial() command. It can't receive though.
However, if you have software that can receive the data this can be passed in to ARC through Telnet or Http. Telnet is the cleanest method, you just need to connect the program which collects the data to ARC via Telnet and send EZ-Script commands over Telnet to pass in the data to be stored in variables or an array.
If your software can't do that then EventGhost can with the serial plugin. Simply use the plugin to receive the serial data and use python to telnet the data in to ARC.
For those brave souls planning to use the Neato Lidar in a stand alone environment you are going to need additional components that will provide PWM control of the Lidar motor rpm to maintain a constant speed. Then a program to decode the hex data output from the Lidar unit.
@IEEEbiofeedback,
If you are looking for a GREAT reasonbly priced Lidar Radar, go to:
http://www.ebay.com/itm/I-AM-SELLING-A-NEW-XV-11-LIDAR-LASER-AT-VERY-LOW-COST-/271247546446?pt=LH_DefaultDomain_0&hash=item3f279d184e#ht_741wt_1247
He was able to use the LIDAR in serial!
If you want questions, you can email to jamericanfreddyATyahooDOTcom
Hope this helps.
Thanks Robot-doc and Rich,
Your suggestion of using EventGhost looks good Rich. I'm familiar with Python enough to pull that together. I found your YouTube video that looks pretty clear.
I'll report back here in the next day or two with my results and what I've learned.
Cheers,
Bill