
Mulberry
USA
Asked
— Edited
H-Bridges Stop Working After Ez Updated
Afternoon All
I just upgraded to the latest EZ software and now all of my H-Bridges no longer work. None of the ports or settings were changed and I've checked and current no longer flows to the motors (12 volt) when direction is activated. This has happened before when I've updated. My ultimate solution was to disconnect everything and rebuild. I really hate to do this each time.
Has anyone encountered this and if so what were you solutions?
Thanks,
Daniel

It wasn't the update that caused the problem.... When was the last time you worked on your project? Have you checked the battery to see if it is charged? Assuming you are using batteries that is.... Fuses, wiring etc....
This is a life size B9 robot and these controls are for his waist and radar movement. The motors are 12 volt Dewerts (I'm running two EZ since I'm not up to speed on coding). All fuses check out and I read current flowing into the H-Bridges but nothing coming out when I activate the controls. The odd thing is this has happened to both systems but the servos that control my claws and bubble lifter are fine.
Daniel
I'll rephrase my comment.... There would have been no software changes in the new update that would account for your H-bridges to stop working.... If it were true then a boat load of Roli's would also not be working....
Re download and re install ARC... reboot and then reload your project... Still, my guess it is a connection or power problem since you have had these type of issues a few times previously....
Do you h-bridges have the LED indicators on them to show the logic? If so, are they illuminating correctly?
No current flow to motors is usually caused by the EnA and EnB pins not receiving a signal (PWM/On/High).
Check the power supply to the H-Bridge(s) and confirm correct voltages If used, check the +5v to the H-Bridge is receiving 5v or if using the on board regulator check the button is pushed. Check both EnA and EnB are being set to high before trying any movement logic. Check In1, In2, In3 and In4 are correctly receiving logic (easily test this with an LED between In1 and Ground, In2 and Ground etc. it should illuminate when set to high). Check the motors are connected to Out1, Out2, Out3 and Out4 Check voltages at the Out terminals to eliminate any wiring faults.
Sorry. I should have been more specific. I'm running multiple EZs in my build but I'll discuss the simplest one.
I'm running one 12 volt motor with a Pololu H-bridge (I'm not using the ones sold by EZ because of the heavy load so no LEDs) on a single EZ board in my leg section. I used an H-Bridge control with built-in PWM. I'm pretty confident the Pololu is wired correctly because it worked earlier.
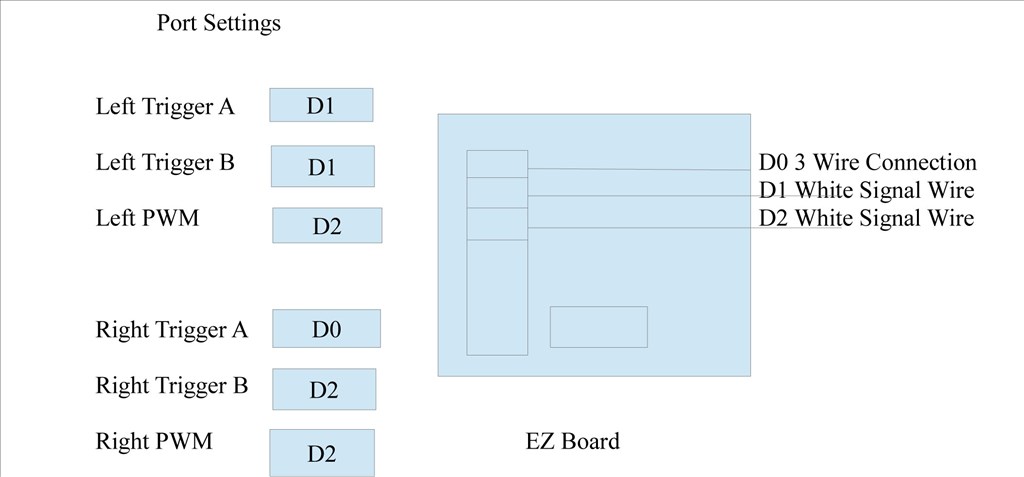
I'm betting I somehow screwed up my port settings although I can't imagine how. I'm attaching an image.
Daniel
Your port layout looks screwed up. On a regular h-bridge i use 2 different logic pins on ezb to control right/left motor directions and use 2 logic pins for pwm for e na and en b . are you using custom movement panels ? On your left trigger ports you have the same logic pins d1 for left trigger a and left trigger b. This will not allow motor direction to be set...
I'm using a non EZ-Robot motor controller/H-Bridge and have had no trouble with the new update.
If your sure you didn't change any settings, it might be worth trying something which is not too hard to do. Start a new project and import all of your controls/scripts ect from your existing project in to the new one. I had an issue with something not working correctly with something a while back (not H-Bridge related), and it did the trick. Like I say, it's worth giving it a shot and you have nothing to lose by doing so. Or open a new project, confirm your wiring is correct and there are no lose connections, and just add what you need to test the motors and H-Bridges. As has been said though, the update should not have effected anything like what your currently facing.
Also, did you try an ARC re-instal that Richard suggested?
And I agree with rb550f that something doesn't look quite right with the setup. Also curious why you have left and right channels if you're only using one motor.
EDIT:
One last thing to check. You say you use multiple v4's in your B9 build. If you haven't done so already, check to make sure all the boards are connected and make sure one is not disconnecting for some reason.
Thanks for the response:
I'm not using custom code but totally relying on the EZ controls (I'm a newbie so coding is in the future).
Haven't tried a re-install. I'd like to save that as a last resort because I have other components set up and running successfully.
So that choice of a two motor H-Bridge controller was a fluke. I happen to choose that one when I first set up the system. Ironically I was able to get it working with the help of other board members. I did try setting up the standard H-Bridge with independent PWM but was never able to figure out the appropriate port settings.
I'm now thinking rather than try and fix this perhaps I should start from scratch on this motor control and go with the regular H-Bridge controller. Taking that approach:
If my wiring of the Polulu H-Bridge should be valid given it worked before. And if my connections on the EZ board are appropriate (in the image attached).
What should my port settings be?
What port settings