
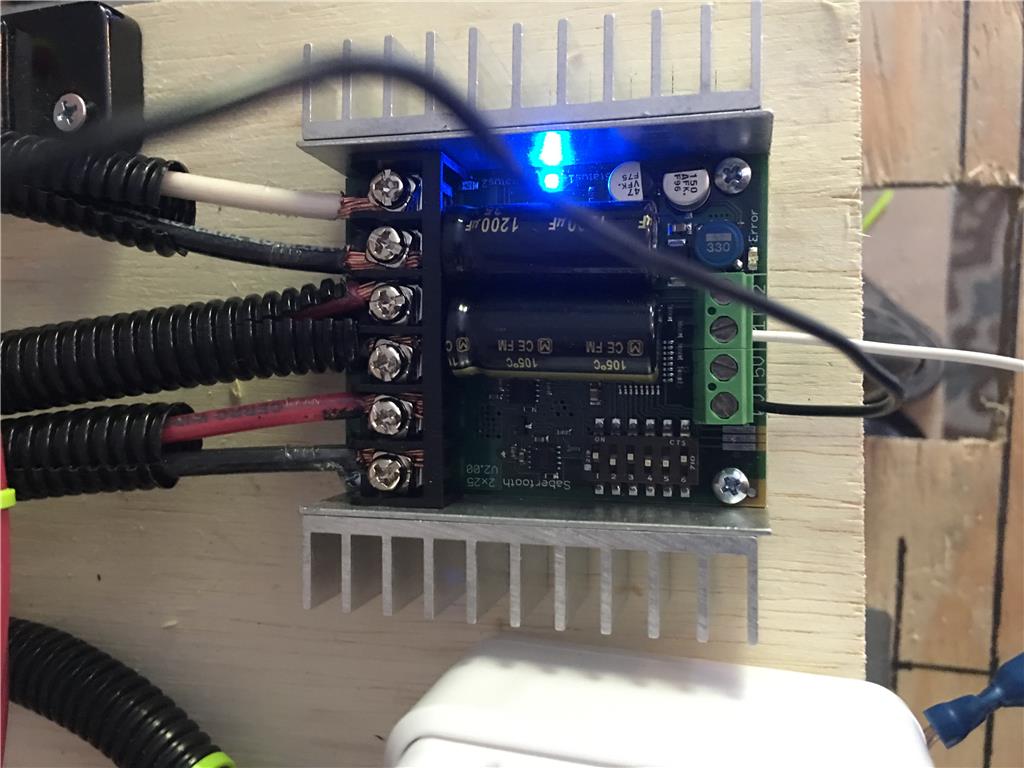
OK, so I have reached a bit of an impasse and need to reach out to the community. I am building a full size K-9. I have got him down to movement now. I am using an EZBv4wifi Sabertooth 2x25, Razor 100w 24v 9tooth Chain drive scooter motors and wheels. The system is running on 12v. I have setup the Sabertooth Serial movement panel, have it tied to the correct port and using 9600 (though I have also tried 38400). I have verified the jumper settings for 9600 (1-U, D, U, D, D, U). I have even obtained a Logitech controller to better test the issue (the 710). I reviewed a few Sabertooth related posts, not the least of which was https://synthiam.com/Community/Questions/8899.
I was troubleshooting erratic behavior, but that seems to be tech induced as I had wired the Sabertooth Signal, 5v, and 0v back through the EZB using one of the inline regulator cables (the 5v servo cables). Then i noticed the 5v POS isn't hooked up to this controller and removed it from the circuit.
At that point the motors started working more like what i want, but not quite right. While it may be more of a Controller thing, the D-Pad is the only thing that engages the motors. That I can live with, though I though it was weird. The problem I have right now (and it persists on mobile AND desktop) is both motors fire in the same direction regardless of the D-Pad arrow I press. Also, when I press LEFT Arrow, it clicks one motor but neither fire.
So I can only go forward at this point, and use 3 of the 4 D-Pad arrows.
Can anyone suggest where I am going wrong? Do I need to build a custom movement panel? Is the Sabertooth Serial Movement Panel just set the port, set the speed, and thats it?
Sidenote, I cant figure out the bounty system. There doesn't appear to be a flag.

@Alan, so if a user does use the saberthooh Movement Panel without a joystick, a person would have to use scripting to control the speed/ ramping?
Thanks
I use a custom Movement Panel for all my sabertooth motor control projects... I use variables so I can speed control on demand... For instance this could be in the script of the "forward" part of the custom movement panel
this can be in the "stop" part of the custom movement panel
etc...
Well, I tried the Sabertooth Serial panel again (under H-Bridges) and it sorta works. I configure which port it is using (D23 in my case), I have not changed the baud settings on the DIP switches, and the Sabertooth panel is set to 9600.
I double checked the threads; https://synthiam.com/Support?id=173 (H-Bridge Sabertooth Serial) https://synthiam.com/Support?id=182 (Scripting Custom Movement Panels) https://synthiam.com/Community/Tutorials/77 (Movement Panels)
CONDITION: RIGHT motor moves fine, LEFT motor varies. EXAMPLE: Controller-Left Stick Forward = Both move forward (though Left seems a little slower) Controller-Left Stick Right = Both move in opposition to create turn (left a little slower i think) Controller-Left Stick Left = no movement from left wheel, right seems fine Controller-Left Stick Reverse = No Left movement Right seems fine.
With all that said, I reverted back to the Custom Movement panel. I was able to reason out the serial range to change the speed.
EXAMPLE: Motor 1 - 1-127 represent Reverse to Forward (1 Being Full speed reverse, 127 being full speed forward). Motor 2 128-255 also represent the range of Reverse and forward (128 being full speed reverse, 255 full speed forward). As a previous post pointed out the mid point of these arcs is a stop. Motor 1 @ 64 should be a stop, and Motor 2 at 192 (maybe 191 per other post..?) should be a stop. Following this logic, 1 up to 64 would be varying degrees of Reverse for Motor 1, and 65-127 would be varying degrees of Forward for Motor 1. Therefore by subtracting and adding values (such as 32, 16, etc) I can trim the speed to something that wont mow down people.
EXAMPLE:
SetSerial (Port#, Baud Rate, Dir/Speed)
Motor 1 FWD @ 50%
SetSerial (d23, 9600, 95) # or 127 - 32
Motor 2 FWD @ 50%
SetSerial (d23, 9600, 223) # or 255 -32
Motor 1 REV @ 50%
SetSerial(d23, 9600, 33) # or 1 + 32
Motor 2 REV @ 50%
SetSerial(d23,9600,96) # or 64 + 32
then apply the same math for LEFT and RIGHT.
So he is at least working more or less. It's hard apply when the stick hits the threshold, but it's better than nothing. Full disclosure, I am using ARC and when i run Check for Update, it shows 2017-7-22 available. I will download and install that next. test again. I am also running this on a Win7-64Bit laptop. I get an OS warning when I started the install that indicates questionable support for Win7 and sugessted updating my OS. Dont know if that is contributing.
TLDR: Works with custom panel, not so much with Sabertooth panel.
@Richard R - I like the variable thing. Makes tweaks easier! I will have to employ that suggestion.
Lol, hahaha
Wow K-9 looks great, k-9 should have went after that car that passed by.
At this point I believe Richard R. is the guru of Sabertooth and motors as he has helped many people on this forum using sabertooth controller. Richard r probably will have more answers if needed.
I remember somewhere DJ has stated in the passed using EZB software needs to be windows8.1 or higher. so you might give a try, I use both win8.1 and win10.
Loved the video, thanks!
Love the K-9 from older Doctor Who,always wanted one when I was a kid! Lools like the exact replica!