This is a video to show you guys how good the Kangaroo/Sabertooth motor controller combo is!
Dave, this video starts by showing the ramp-up - full speed - ramp-down algorithm that I coded on the PIC microcontroller, you will see how GET_POS is read and controls the ramping up/down. The ramp-up and ramp down rates can easily be change via a variable. When I get my V4, I will port the algorithm over to an EZ-B script for those that want it.
The second part is to show you folks how important encoders are, here you can see the incredible synchronising that the Kangaroo's auto-tune PID has. I have sent it precision movement (distance) commands for hours with barely no loss of motor synchronisation which means that you can build a robot that will accurately move in a straight line and move/turn to the exact distances that they have been previously programmed/taught. I use this for accurate room mapping and having pre-learnt routines which enable my robots to move from one room to another or to a particular room location.

Tony, God Bless You! I know about the "old" business. I have my BIG birthday this month on the eleventh. (65).
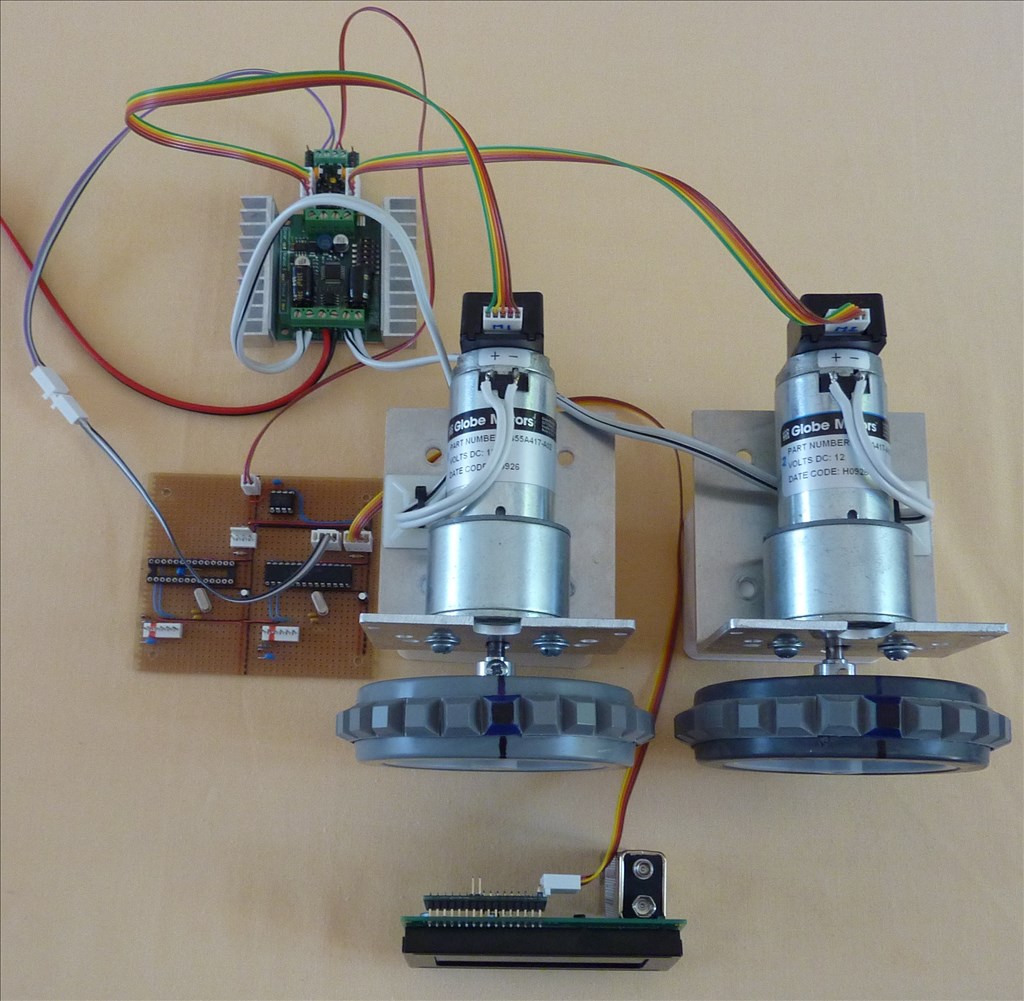
As a kind of tribute to the Kangaroo, have a look at how much simpler the new EZ:1 Robot (Kangaroo based) locomotion system is compared to my older PID locomotion system! They both operated as well as each other but the Roo version is so much simpler (and lower cost) and the brilliant self tuning function is the icing on the cake.
Above is the new system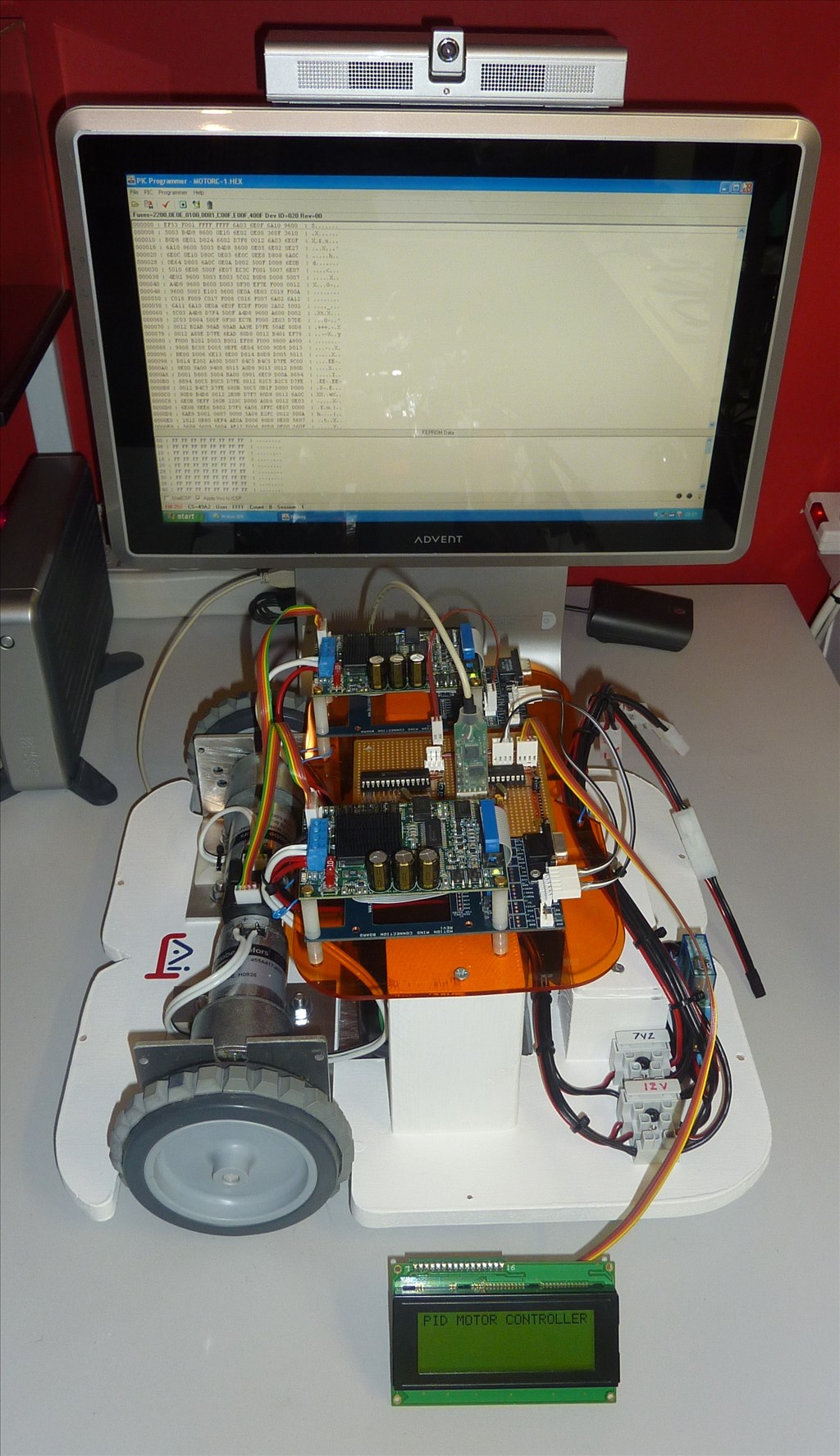
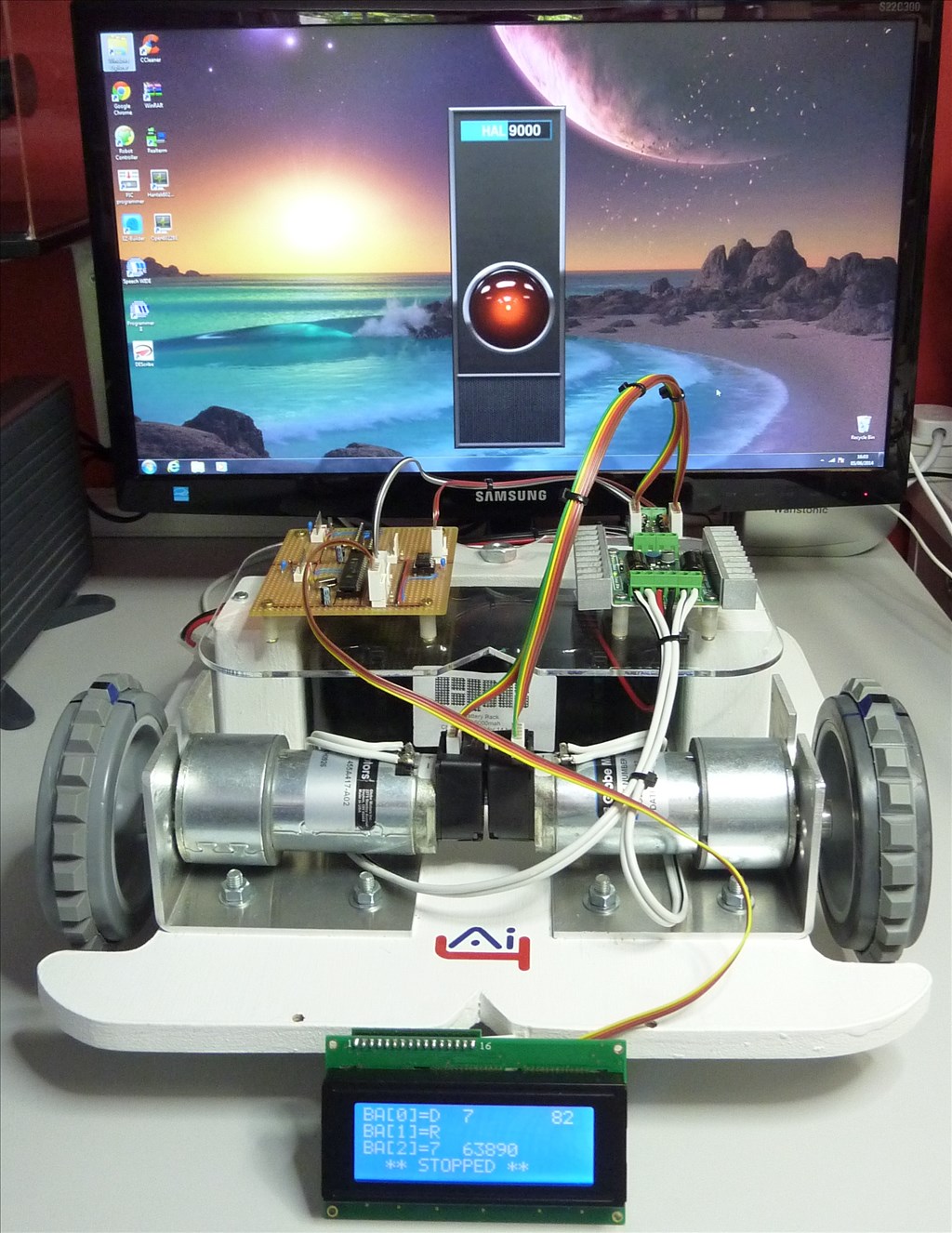
Here is the older systemMatt, the DEScribe software from Dimension Engineering is really good, you should find it very helpful.
Mel, Happy Birthday for the eleventh! I reach 58 this month too, we have seen some great robot developments in our time, but I think EZ-Robot (and DJ) are the very best thing that has ever happened in personal robotics!
Tony
Both are super impressive setups Tony. The top one is still your v3 setup right? I thought you received your v4 already. I'm hoping that if the USB-delink arrives today that I'll be able to at least set up the kangaroo/sabertooth &encoder side of things despite not having bidirectional com yet. I'd like to see how these encoders work. I have a big birthday (for me) coming at the end of the month too. I've sold my wife on this robot build until then and hoped to have it completed for the most part by then,that's where the urgency comes from. I know I can make something here and not just another garage built project but I fear I'm all over the board with what little I know. I'll keep you all posted and appreciate the encouragement. Matt
thanks, Tony.
Well, my cheap a** $6 potentiometer I'm using for feedback to the Kangaroo x2 for my waist rotation motor took a crap. At least I'm pretty sure it's the Pot. I takes a couple tries to get a decent Auto tune even through the DEScribe PC Software. Then when a command is sent the motor only goes a few inches and the Kangaroo shuts down and blinks an error code saying there is a control malfunction. What really tells me it's in my feedback is that while this is happening on Channel 1 my other motor on Channel 2 is accepting commands just fine. Here's my set up as it's built now:
I'm not even going to bother testing the pot as the shaft where I have the gear attached even feels loose. I'm going to bite the bullet and go ahead and replace the entire motor with the one Tony AKA @Toymaker suggests and shows in the first vid of this thread. I've decided to get the X2 speed model with the high resolution encoder already attached to the bottom. It has less Rated Torque(in.oz.) at 150 so I hope it will be strong enough. My waist spins real easy so I'm not really too worried. The one Tony points to only is 45 rpm and I don't think it will be fast enough for some of the animation I have planned.
Here's the link and a pic as suggested by Tony but the faster motor:
REX Drive Motor w/ Optical Encoder 2X Speed Item #: MR200
I only have one question; I ordered an encoder cable from the same place. In fact it's the only one they sell. I hope it's the right one. If not could I get a suggestion where it get the proper one that will fit:
HEDS 5500 Encoder Cable Item #: 146
Thanks! Dave
Dave, that cable should be ok, but there is no picture so I cannot, be sure. If it is not correct, I will make you a couple of cable/connectors and send then out to you by air mail so you get them quick.
I now have the fantastic V4, and I am well impressed! I am currently on a big project for my Toy Invention Company so I have not had a lot of time to play with the V4 yet, but I will be able to in a couple of weeks, so will then be able to do those Kangaroo scripts for you.
Welcome James to the forum who I believe is part of the Dimension Engineering tech team.
Tony
That's awesome Tony! I hope you get to play with the V4 soon . Your going to love it! I'll let you know if I need help with the cable but once I get the motor I should be able to figure it out. I just wanted to get a jump on it just in case someone knew I had the wrong one on order. Do you know if this is a 0.1 connection size or smaller?
Awesome Tony.... I appreciate it too.... And James, welcome.... awesome to have you here... Help us with the Kangaroo, and I am sure this forum will sell you a boat load....