onedayflie2
Netherlands
Asked
— Edited
Does Anyone Have A Cytron Smartdrive Duo 30 And What Are The Diffrences?
Does anyone have a Cytron Smartdrive Duo 30 and what are the diffrences with a sabertooth in settings?
https://www.cytron.io/p-30amp-7v-35v-smartdrive-dc-motor-driver-2-channels
Folowing the manual and comparing it... I came to these settings... Still have to test it... But maybe someone has some conformation?
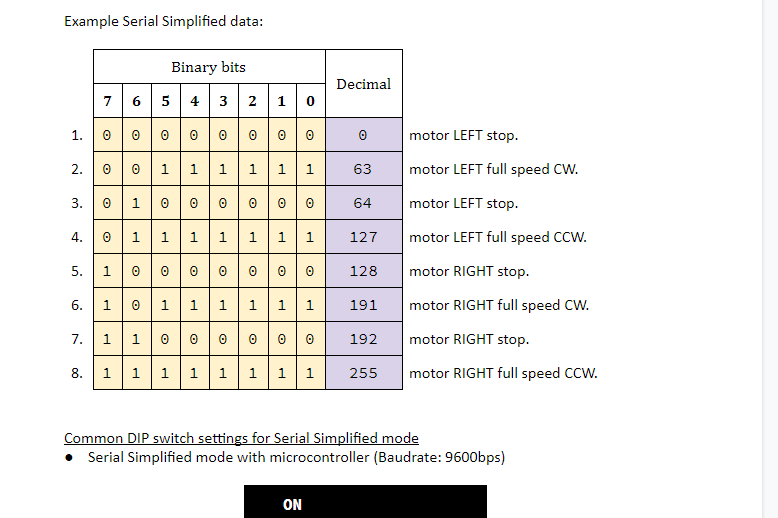
Stop
SendSerial(D0,9600,0) SendSerial(D0,9600,128)
Forward
Motor 1, 63 is full speed forward.
SendSerial(D0,9600,63)
Motor 2, 191 is full speed forward.
SendSerial(D0,9600,191)
Differential Turn Right
Motor 1
SendSerial(D0,9600,63)
Motor 2
SendSerial(D0,9600,255)
Differential Turn Left
Motor 1
SendSerial(D0,9600,127)
Motor 2
SendSerial(D0,9600,191)
Reverse
Motor 1, 127 is full speed reverse.
SendSerial(D0,9600,127)
Motor 2, 255 full speed reverse.
SendSerial(D0,9600,255)
And what about the Speed Changed setting?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Sabertooth Movement Panel
by Dimension Engineering
Sabertooth movement panel: control two motors via Simplified Serial with variable speed sliders, movement buttons, and serial port options.
Requires ARC
v10

The commands look right - but you'd have to test.
If you want speed control, there's two ways to go about it
Create a skill control
Use a custom movement panel
If you choose #2, there's a $speedleft and $speedright variable which you can use. You'd have to use a little math to determine the speed for each direction.
It has been a long time, but i am back on this project
So i have made a custom movement panel. Everything works... But it's just one speed... i managed to found out if i set lower numbers in the script the speed will be lower... But the 2 shuffles for speed won't work.
Would be nice if the sabertooth script was editable or viewable so i can compare
I found Gwen's question... about "ramping" As i understood this was to build up te speed instead of only 1 speed that stops abrubtly (https://synthiam.com/Community/Questions/Movement-Scripting-Help-Please-2983)
I loaded the latest script and changed some perimeters to be compatible with this controller. But it doesn't seem to work for me...
I think my problem is... Where the sabertooth increases the speed from a stop. 0-10-9-8-7-6-4-3-2-1-0-1-2-3-4-5-6-7-8-9-10 The Smartdrive Duo increases otherwise 0-1-2-3-4-5-6-7-8-9-10-0-1-2-3-4-5-6-7-8-9-1-0
example smartdrive duo

vs SabertoothUse your controller in RC mode and it'll solve all your troubles. Use the Continuous servo rotation Movement Panel instead of the sabertooth one. Read here: https://synthiam.com/Products/Controls/Servo/Continuous-Servo-Movement-Panel-16096
Thanks for the fast response I was reallly mindboggling about what to do.
I was reallly mindboggling about what to do.
Going to try that and let you know my results. But if i look at the manual that should do the trick THANKS!
THANKS!
They did all the planning for you ahead of time it seems. It makes most sense to re-use the continuous rotation Movement Panel since it's created for this use-case...
It works! THANKS! I only need to adjust the speeds and sensitivity, but how that works i allready know
Is driving with the RC option also possible in autonomous mode? And what is the diffrence exactly between Simplified Serial and RC mode for robotics? I thought i really needed Simplified Serial... (because everyone goes for that with sabertooth in the R2D2 world) I am trying to understand that part
There’s no difference. The outcome is the same. You want a robot to move. So how it moves is irrelevant with our software.
long as it moves with a movement panel, all movements are supported. Read about movement panels here in the manual: https://synthiam.com/Products/Controls/Overview/Movement-Panels-17372