
mtiberia
Canada
Asked
— Edited
Dj A Feature Request For Lidar-Lite Laser
Hello DJ I'm using the LIDAR-Lite Laser Rangefinder by PulsedLight in my project and would like to know if you can add support for it in ARC/ Ez-Script.
Its very similar to the " GetPing( trigger port, echo port ) " command except the trigger port is low and the echo port measures the low to high output pulse width in milliseconds .
Thanks
(https://www.robotshop.com/ca/en/lidar-lite-laser-rangefinder.html#Useful%20Links)

I second that request.
Ditto the request
The the LIDAR-Lite Laser Rangefinder by PulsedLight also supports I2C as an interface. It should be possible to write an ARC script that can talk to the LIDAR without adding a control.
If it does get supported in ARC. Perhaps it could be supported similar to a ping sensor type control and a radar type control which would control a servo to sweep the LIDAR as well.
The manual for the LIDAR is at:
https://www.robotshop.com/media/files/pdf/operating-manual-llm20c132i500s011.pdf
What is the most popular lidar sensor?
There only seem to be two, Lidar Lite by PulsedLight and the Lidar unit out of the Neato vacuum robot.
Pulsed Light seems to be more attainable. i'll order one to try out
Hi DJ
If possible try and make it flexible to also use the Neato Lidar as I have just ordered that one ...
Cheers
Chris
ps - I am looking forward to ordering some of these new sensors when they become available in the shop too
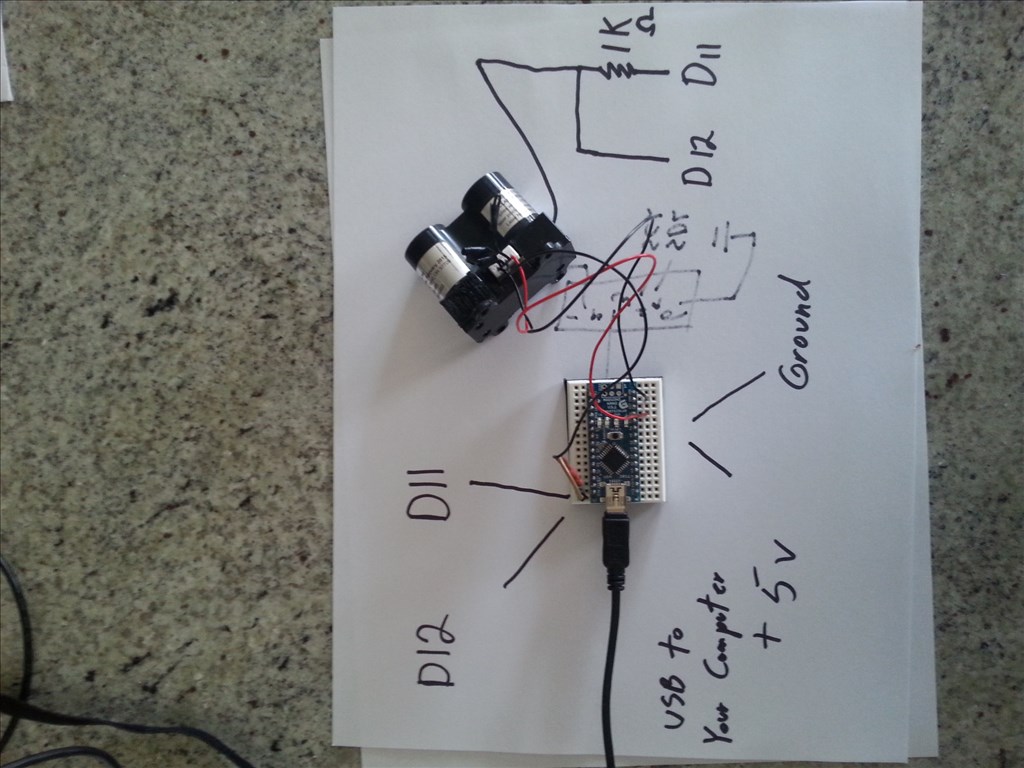
That would be great DJ . I'm using it with the arduino nano and communicating with the EZ-B with the new com feature you added.
The sensor has a good range and has no issues picking up soft targets like the PING does. Don't want to run into those pesky humans wearing those bulky sweaters !
I just keep the trigger pin low and the echo pin measures the time the pin goes to low and back to high.