
aronpeto
Hungary
Asked
— Edited
Bluetooth Connection Error Firmware V16
Hi DJ & EZ-Robot community,
My Ez-Robot worked well in the old ARC version. Today I installed the new ARC version. The robot is not able to connect to Bluetooth.
I checked the tutorial about firmware update and Bluetooth connection. I have XP 32-bit. I have usb Bluetooth module (own software) I do not have Microsoft Native Bluetooth program. My bluetooth software show only one comport. I think that is the problem. Please help me! Where can I download Microsoft Native Bluetooth program? What can I do now ?
Thank you for your help
Aron

Interestingly, I've been able to play a great deal with my setup of late, and I've been having a heck of a time reconnecting to the ezb when I have those unfortunate moments where my robot freaks out due to the, ehem, "skill" of my scripting.
My firmware is the latest, and my batteries are fresh.
After updating to fw version 16 I have had a lot of issues connecting and staying connected to my EZ-B. I have put in new batteries too more than once
D.J..... maybe a bug?
It could be a lot of things, the three most common that I've seen in my short time here are Brownouts (try a different voltage and capacity battery - what are you using?) Bluetooth Stack Software, I notice you said it wasn't microsoft stack, try using the MS one and see how that works. Interference from other wireless devices such as wifi and rf.
Received the EZ-Robot complete kit however there are problems getting ARC connected to COM9 port, via Bluetooth. Have exhausted all the suggested ways, videos and in the forums. Diagnostic was a pass, all connections as expected in the video. However ARC will not connect. My system is a Windows 7 / 64 bit PC, I'm using latest ARC version 2012.12.19.00. BT module blinks red and remains steady only when attempting a connection, using native MS BT stack, baud rate 9600. Blue led pulses on and off constantly when powered (power is 7.5vdc) no slow pulsing as in some of the videos.
ARC Debug console capture:
Attempting connection to COM9 Comm Err: The operation has timed out. BbytesToExpect: 1
ARC Firmware: Disconnected Connection Failed: System.Exception: Controller Not Responding at EZ_B.EZB.Connect(String hostname, String tcpPassword) Disconnected
Image OK <<
Please let me know what can be done to get things working, thank you.
@Komissar can you verify you are using the Microsoft Bluetooth stack? If so, please use the Contact Us form and someone will be able to assist you.
It is imperative that you use the native Microsoft Bluetooth stack. We cannot offer support for any third party Bluetooth stacks.
Hi DJ & EZ-Robot community,
Thank you for your help. I changed the Bluetooth stack. Now works well.
@aronpeto awesome!
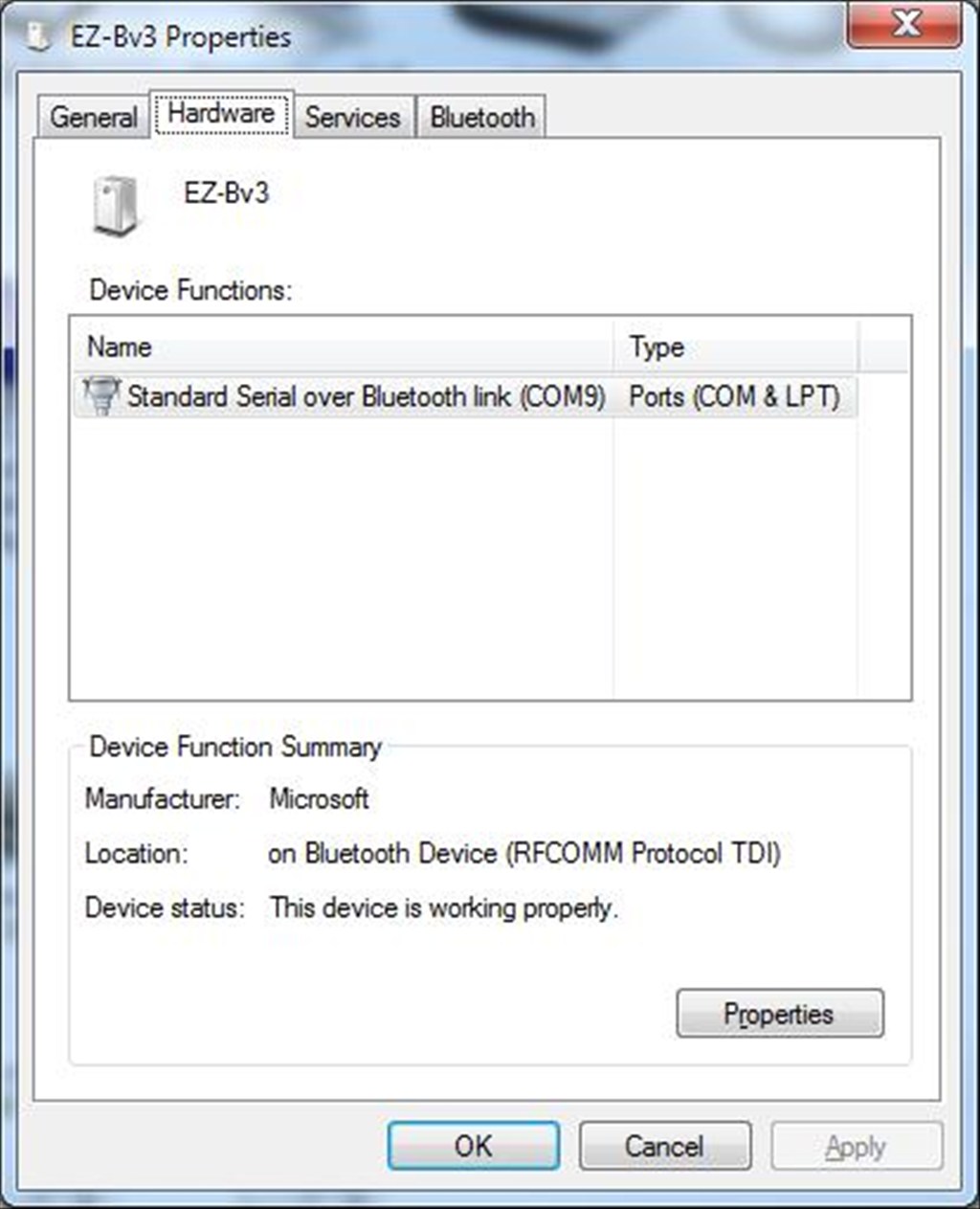
@DJ Sures
Here are screen caps of the MS BT driver. Let me know if I've missed something, thank you.