
stevehaze
United Kingdom
Asked
— Edited
Autoposition Changes All Servospeeds
Hi
In my InMoov project i have some movements that I am trying to do at different speeds occasionally. In this instance, I want to move the head right, so I am currently either using the script command...
ControlCommand("Autoposition", "AutoPositionFrame", "Head Right", 1, 1, 2)
This moves the head with a very quick 1ms delay with 1 step at speed 2 (not very fast). The problem I'm having is that this then sets the ServoSpeed for ALL servos to 2.
This then interrupts his ability to speak as the TalkServo then has it's ServoSpeed set to 2 and not 0 which it needs. Why is the AutoPosition and speed setting ALL the servos to the same speed?
Am I missing something? (The answer is probably yes).
Thanks as always
Steve Haze
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Auto Position Movement Panel (Gait)
by Synthiam
Create servo frames/actions to animate humanoid, hexapod or custom gaits with smooth transitions, SW ramping and directional control

Are you using the latest ARC software?
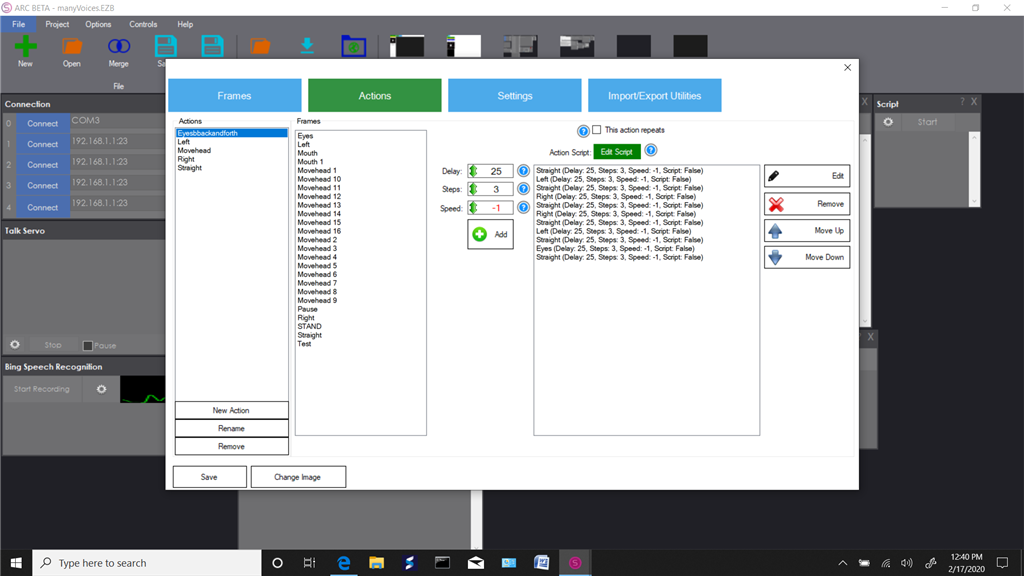
After I make a action from my frames that I made:
I can then go into the frames and edit each individual frame
you can edit the delay, steps and speed
Yeah I'm using the ARC beta.
And I can edit everything there ok....but as soon as I call an ACTION or a FRAME with a Speed setting, the ServoSpeed for ALL servos get's set to that speed. Does that make sense?
Speed setting changes for ALL servos in the autopostion. It’s a single setting. Don’t use the servo speed setting if you don’t want the servo speeds set.
instead, before calling the frame manually. You can specify the servo speeds individually for the servos you want to adjust.
Ah ok. Thanks
I thought it was something I wasn't quite understanding.
Thanks as always for the super fast responses!
Anytime, sir!
does make me wonder if there’s an advantage to having a speed setting for each servo in a frame of an action. Maybe someday in the future we can add that