robo rad
Canada
Asked
— Edited
2 Single Motor Controllers
Just wondering if any one has run 2 single motor controllers instead of a dual channel H-bridge on their tank style robot and will it be hard to get both controllers to work with EZB 4 at same speed when moving forward/backwards? I ask because robot shop was out of the dual H-bridge I needed at the lower price range and I ordered 2 single 13-30 amp motor controllers instead at about the same price range.
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24


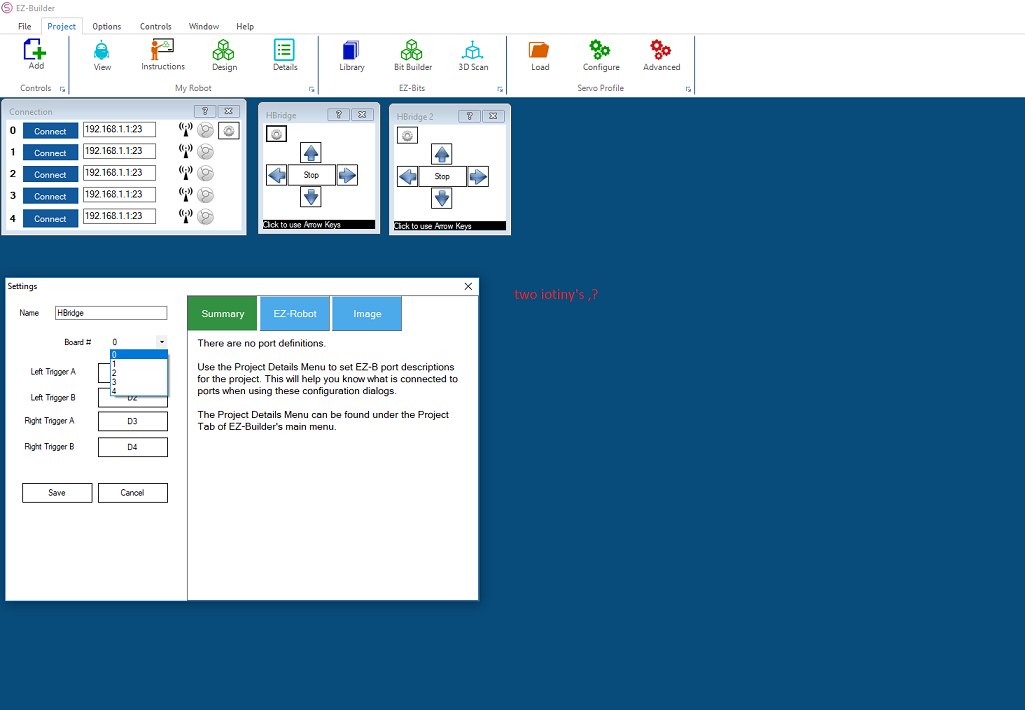
maybe you can use two iotiny's in your project.I don't really want 2 Tiny's but I know I can use H bridge #1 and #2 in ARC, but hoping I can keep both motors running at exact same speed or else the robot wont travel straight.
Just use the same wires on the ezb for both hbridge. You don’t need separate controls. Connect the wires together. It’ll be the same speed.
Thanks DJ, great to know that as I already ordered the parts and then I thought oops, I should have asked about this first in the forum before ordering but it should work out well then.
Hmmmm....interesting once I added the left motor single motor controller it worked with the buttons to go forward backwards and then I added the right side motor and controller and did the same but using the same H bridge software control in ARC had no PWM slow or fast and could only get forward working with both motors at the same time, Left and right work but only one motor at a time instead of 2 going in opposite direction(circle motion) I thought this would be a simple wiring sollution but I guess using 2 separate motor controllers needs to be wired differently than the old dual motor controller I had before. This will take more time to figure out than I originally thought.It could be just a ground wire issue too and I may need to make 2 PWM input separate channels instead of the one I had connected together before.
So this is what I have but 2 of them to control 2 motors on a left right tank. I just need to figure out the EZB output pins to the Dir,Ground and PMW pins on the controllers instead of connecting to Arduino to EZB signal pins. The wiring seems slightly different from a dual channel L298 H bridge so I am needing to change some wires around for signal inputs of 2 separate controllers instead of 1 298 h bridge.
And this video is exactly what I am doing but with EZB instead of Arduino,so I just get confused with the old EZB signal pins I had were 13,12 and 15,14 with pin 16 as my PMW in a y connection so it controlled both motors on the older L298.