
CRich
USA
Asked
— Edited
2 H-Bridges?
Hello all,
I am trying to connect 2 H-bridges to my EZ-B. I followed the online tutorial and successfully connected 1. However, when attempting to connect the 2nd one I ran into some trouble.
The second H-bridge would only move one servo, in the up, down, and "stop" positions ... odd. The other servo showed no movement
I want 1 bridge to control forward and backward movement, b/c these two servos will be dedicated to only F and R
The other bridge is to control left and right movement.
Please advise me,
Thank you

Cant do that with the movement panel. You will need scripting..... what drive system a are you trying to make? Maybe there is a better or less complicated way.
Wait... is this a balance bot with x and y axis?
yes it is
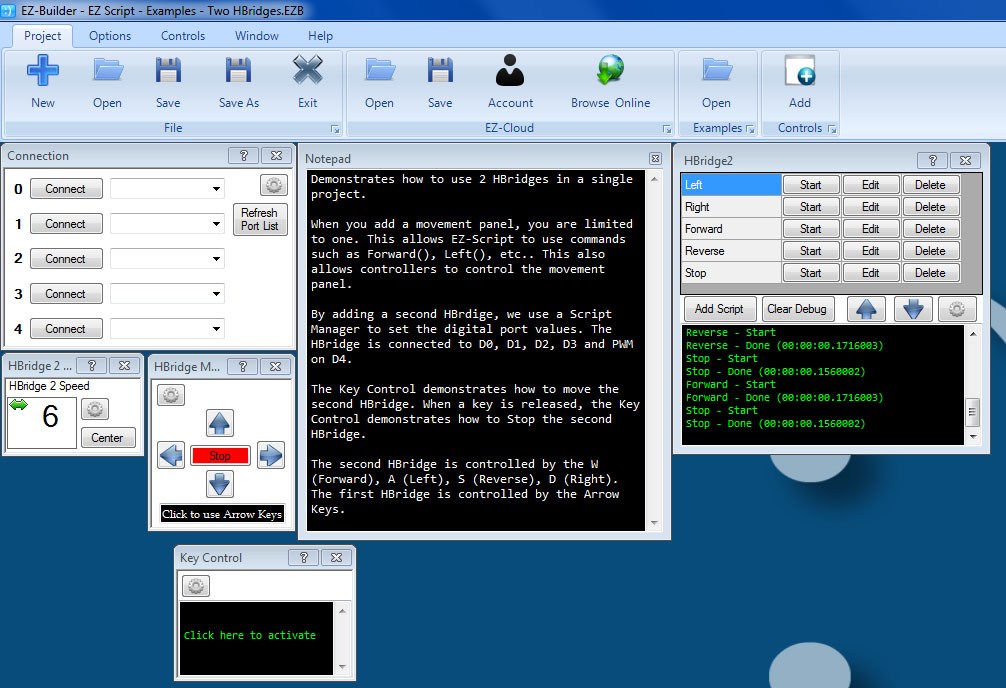
Create EZ-Scripts for both HBridges
You can control the output of the EZ-B to set the HBridge directions. Also, there is a Custom Movement Panel which allows scripts. You can use the SET() function to enable/disable outputs
D I connect them as described in your video? What about the second one?
*Do I
Connect both HBRidges like you see in the video
only one can be controlled by the HBridge movement panel. The other you will need to make a simple script for.
My suggestion is to get one HBridge working first. Read about how it works, then when I say "Make a script for the second hbridge" will make more sense to you . And i'd be able to provide a quick script to show you how
. And i'd be able to provide a quick script to show you how
Ok, great. In have the first one working. I hooked it up like in the video.. And I have the wimote controlling it.