
PRO
RoboHappy
USA
Asked
New Robot , REMI
Thought id share a look at this new kit I received from SuperDroidRobots. Its a 4wheel drive, mobil steel base. All motors are 24VDC. y plan is to move My Hemi bot, with its Actobotics framework over to this base instead.

Just getting started, so stay tuned

Finally... I decided to add the arms... (excuse the sideway view haha)
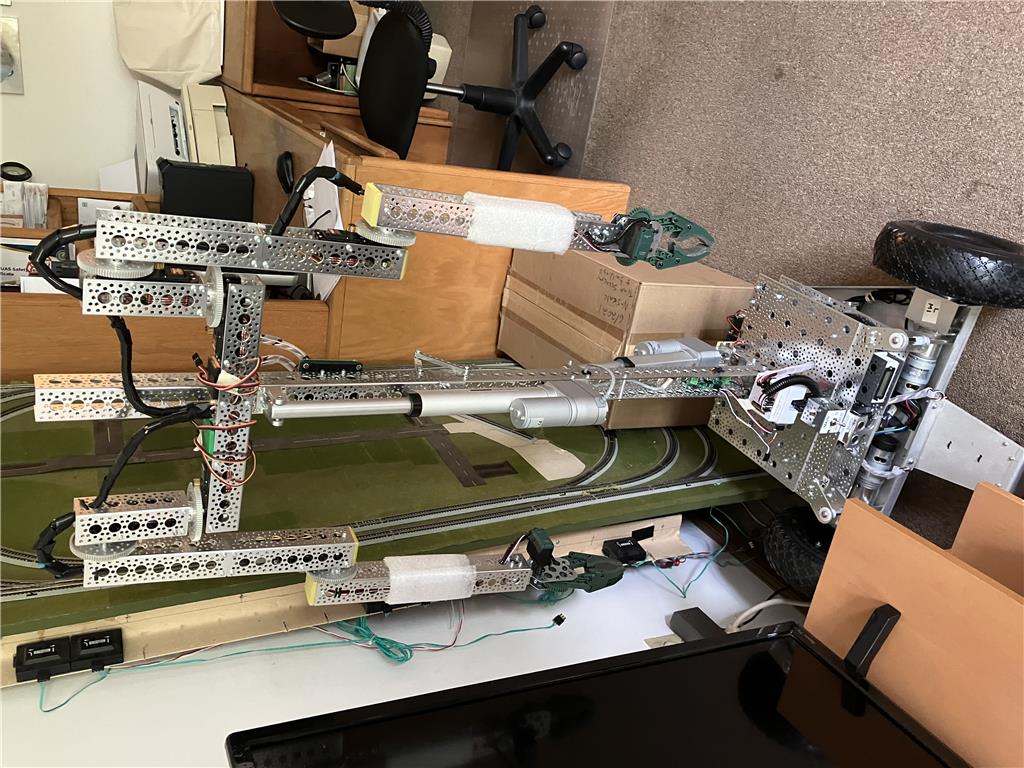
Front of the robot
Rear of the robotI'm happy I was able to move the arms from my Hemi robot to Remi now. Robot is getting taller, which now has brought on its own set of new problems. First off the stability which I really noticed when the robot drives ahead (might see this is one of the recent videos I posted) it wobbles some. I'm thinking either adding some support struts to the lower spine or add add a sorta of support tray to keep things still as it drives forward. Another thing i'm still wrestling with is the robots turning speed. Left or right turns are way too fast and also cause things to swing about. I'm still trying to find some sample code around here that will help me slow this issue down alot. If anyone can point me in that direction, that be great. Think some redesigning is in need here. One idea I am also still trying to figure out, is Remi's "head". Needs something fitting for this.
Looks good,
I had a similar problem, with height, base needs to be bigger, wider to bear the weight of the height.
One thought: Did you try the servo speed control? Servo Speed - servo - Robot Skills - Support - Synthiam
https://synthiam.com/Support/Skills/Servo/Servo-Speed?id=16044
Hmmm, interesting. Not sure it will work for me though. I have to send "SimpleSerial" commands to a Roboclaw controller (acts just like a sabertooth). I used both the Sabertooth and the Custom Movement Panel and created scripts as needed. Except for the left/right turns, which I had to use old ezscript code to get the bot to do a 90 degree turn then stop (just does it too fast) The Roboclaw does also accepts pwm commands from an R/C receiver, might be an idea to go that route as I think about this more.
more.
Hellooo ! Since Its been awhile, thanks to life in general, figured Id just pop up a couple photos of the progress, which hasn't been too much since Im still making changes as I go along.. (will this ever be finished?? haha) (sorry for the flipped photos again)

This is the rear view of HEMI, but is in the process of a redesign, for a stronger spine that wont wobble about when it drives around.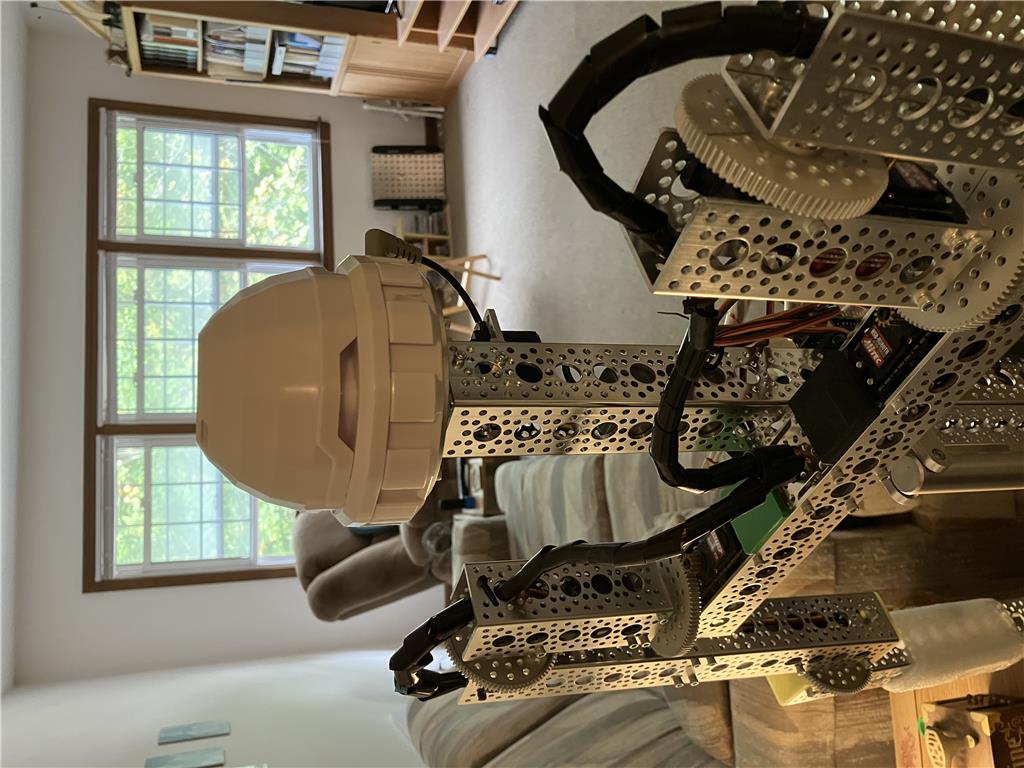
The "head", which Im still rethinking on what I want to do. I am planning on using 2 EZB units if possible Details to follow.....Thats all for now.... Please any comments or ideas, I love to hear em! Happy building my friends
Nice. So much servo City Bling. I love the look of raw aluminum.
Great going,
does it move yet?
Does the height make it wobble?
Happy 4th
Happy 4th !
I do have it moving about. Finally worked on slowing it down alot more, especially when it makes turns. I'm able to use both verbal command and manual control via the movement stick control. Also still have RC control if needed as well.
Yea, the wobble was not good, def due to the height and the fact that I was a little flimsy on the metal support at the base. Im am now looking to beef that up alot, and may get rid of my "folding spine" option. May order another higher torque actuator from Servocity as another option to try as well Im being picky with this design I guess, I'm not satisfied until it I get it right lol.
Im being picky with this design I guess, I'm not satisfied until it I get it right lol.
any videos yet?