
All Community Content



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Robot Sticker

Hugging Face
Connects your robot camera to Hugging Face AI models for vision chat, object tracking,...

Autonomous AI
Autonomous AI robot agent with vision, speech, movement, animations, memory, and self-directed task...

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Arduino UNO wheel encoder: reads left/right ticks, provides counts, configurable ticks, wheel & pivot sizes, optional pose telemetry to ARC NMS.

Custom Zoe robot head with added mouth, standard metal-gear servos and EZ-Robot V4 controller, camera and illuminated eyes for mobile social robot

Choppy Audio File Out To EZ-B
Running ARC directly on a Rock Pi X (Windows) mounted in my bot, streaming audio to an EZ-B v4 over WiFi using the Audio File Out EZB skill. The EZ-B is set as my...
Controlcommand For Sphero From Script
I’ve got a Sphero paired over Bluetooth to my Windows laptop and the Sphero Movement Panel in ARC drives it fine (forward/turn/stop from the UI...
Route Audio File Out To EZB 1
ARC is running on an Atomic Pi inside my bot, and I’m trying to get audio to come from the head speaker. I’ve got two controllers connected over WiFi: an EZB v4...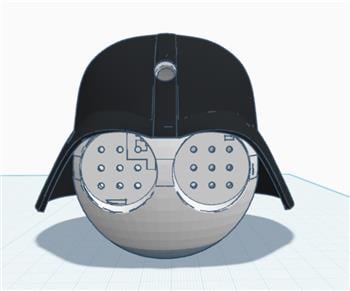
JD Darth Vader Helmet
Hi Roboteers, What do you think about a JD Darth Vader? Tomorrow I'll test-print JD's helmet. Because of the black filament/color, the LEDs won't shine through, so I drilled out...
My First 3D-Printed Robot
Here's my first 3D-printed robot! I used the EZ-Robot InMoov Head Kit and tested it with the sample projects available in Synthiam ARC. I'm still exploring...
The Mask Is The Message: Why Your Robot’S UI Might Matter More Than Its IQ
Robots don’t just need brains; they need good stage makeup. Here’s why...
Detect When PC Audio Finishes
Is there a built-in variable named $PCPlayingAudio? If not, how can I determine when an audio file has finished playing? I'm using the PlayAudio(filename)...
Smoothing Frequency Detector To Mega Servo
I’ve got an Arduino Mega 2560 connected to ARC over USB using the ARC Arduino capability, with a single MG996R on ARC servo port D0...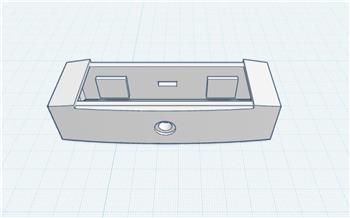
Robot Waist Part Completed
Hi Roboteers, I finished the waist part for my robot build - no more open sides. Short video: https://www.youtube.com/shorts/f6G-E3LHzu4 STL file attached if anyone...
Using Getrss Data In Javascript
I’ve got an OpenCM 9.04-C on USB with an XL-320 (ID 1) and ARC is talking to it fine with the Robotis DYNAMIXEL robot skill. I can jog the servo and run a...
Fxrtst's Mecha Morphix Robot Platform
Build and program the Mecha Morphix robot head ALAN with hours of 3D printing, assembly, wiring and coding tutorials plus BOM and modular parts.