




The first real but not main reason for Wall-E construction was that my son loves movie Wall-E and the second one was that I lost my son because of his abduction by his mother from his home and subsequent divorce in a country where the law is just a piece of paper. This (Wall-E robot construction) was and is a way I could be with my son.
So back to the project. Wall-E from Louis T was an inspiration for me. But I found own way how to solve construction challenges, how to replace wrong or destroyed servos etc.
List of necessary parts: EZB Board V3 Metal gear digital high speed modified continuous servos for wheels - HS5245MG Micro metal gear servos for wheels tilt -HS81MG. Mini metal gear servos for vertical arms movements - HS81MG. Micro servos for horizontal arms movement -HS56HB. Micro metal gear servo for vertical neck tilt -DS-939MG. Micro metal gear servo for horizontal neck movements-HS81MG. Micro servos for individual eye movement DYS 0202. Sub-micro servos/mods for eye's lid animation HK 282 with voltage regulator 5V/3,3V. Get rid of dummy cables in the head, run all servos/camera wires from head down the same way and use heat shrink/black nylon mesh for realistic look. Red and white high power LEDs between eyes. Mock up left eye's lens. Analog Sharp GP2Y0D805Z0F IR Range Sensor HC-SR04 Ultrasonic Range Finder Wirelless 2,4G camera 199MP3 Module SD memory card Dual 3W amplifier BT module BEC 5V separate power supply for amplifier LiIon Battery monitor and old toy U-Command Wall-E from eBay LiIon Accu - 3,4Ah 7,2V and with protection circuit 5A
One image replaces a thousand words, so now I will use pictures with short description:
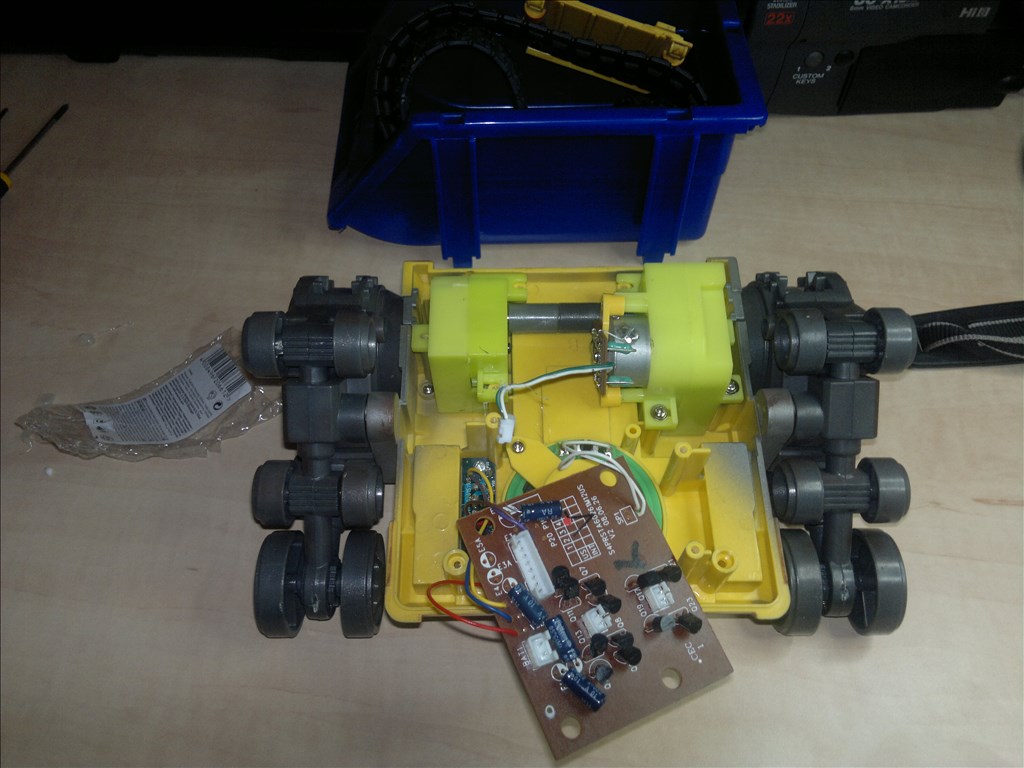
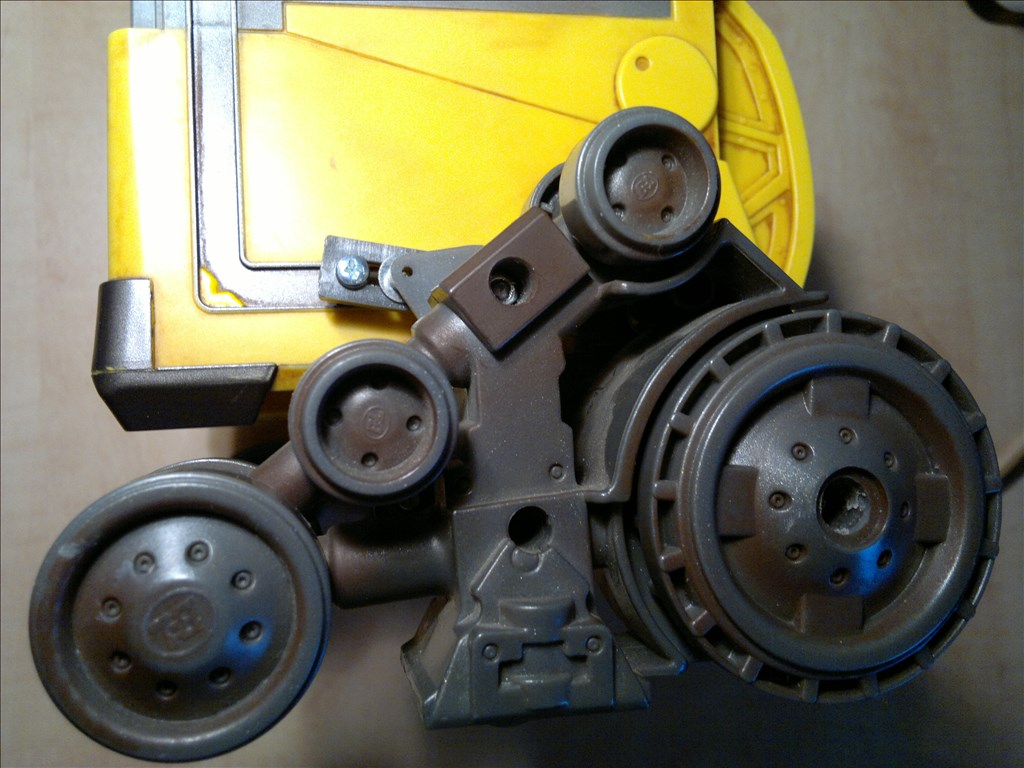
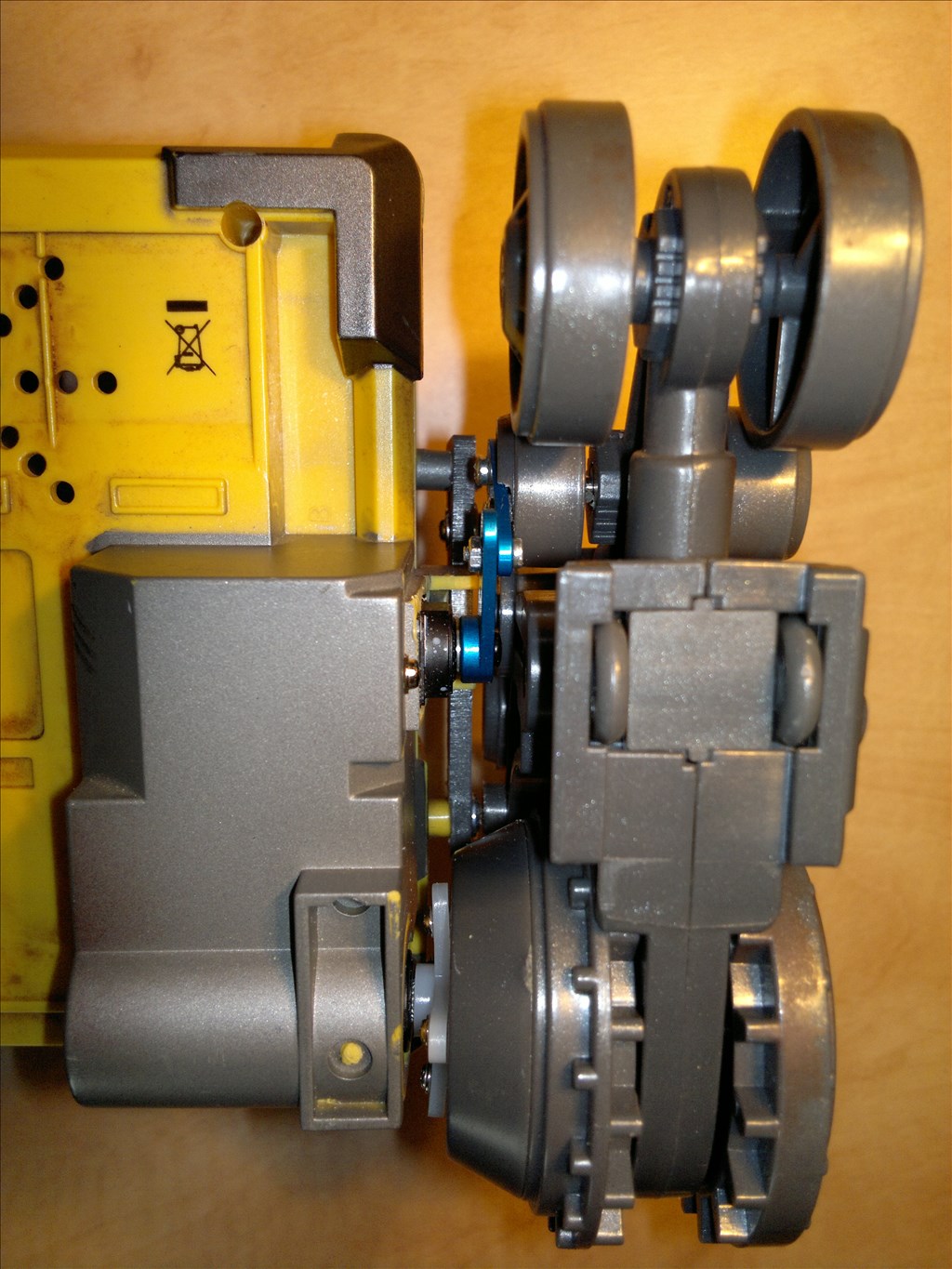
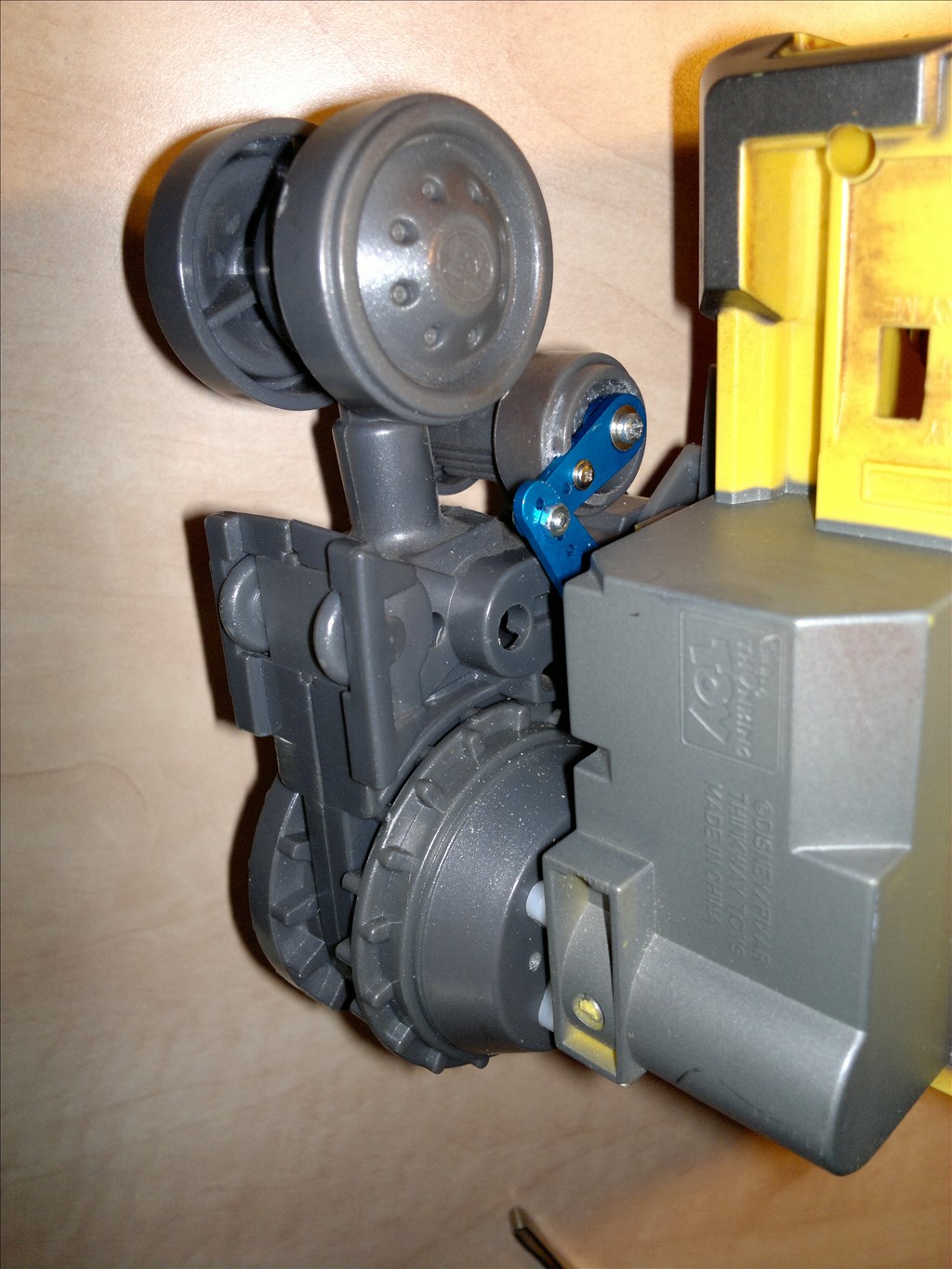
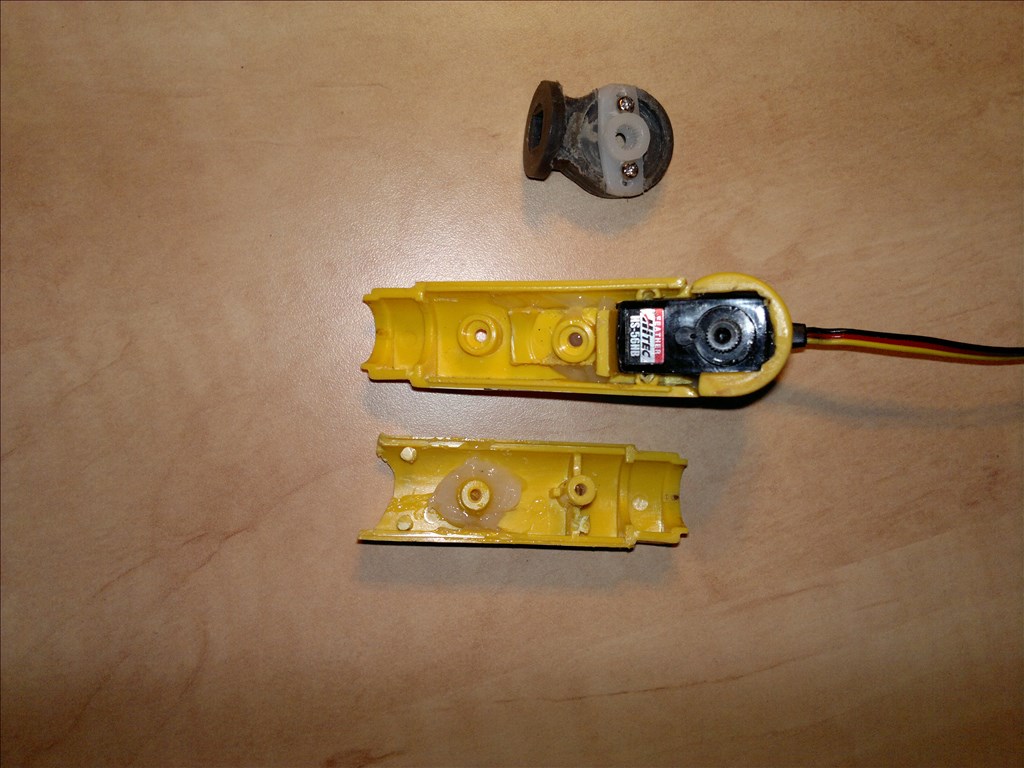
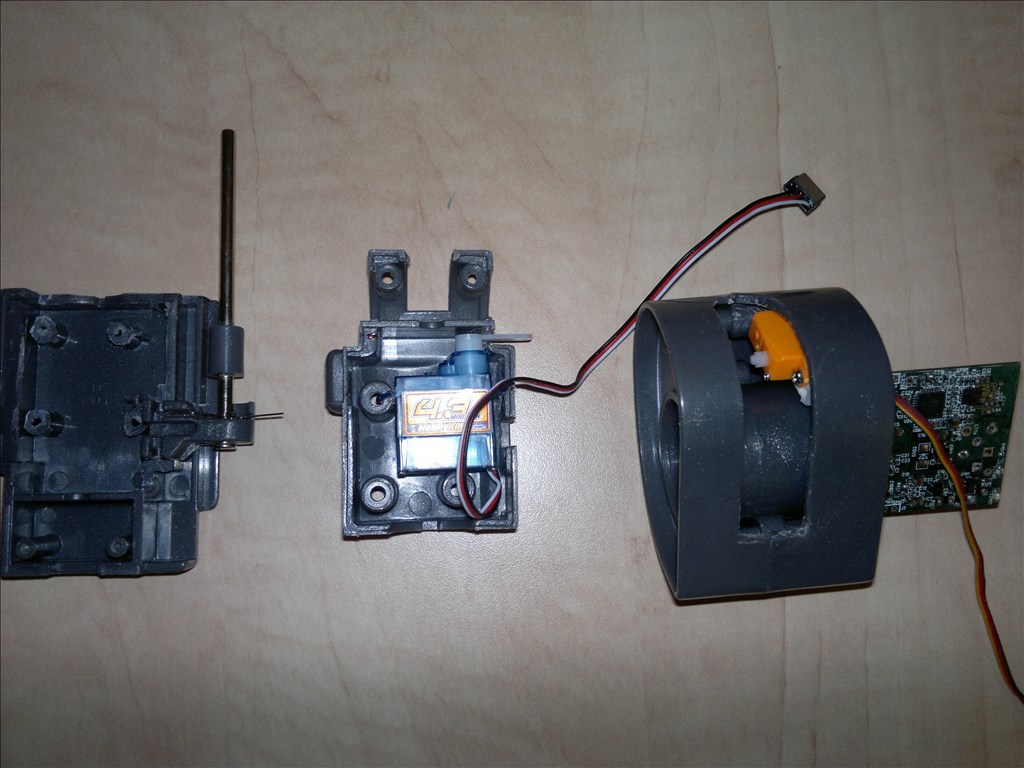
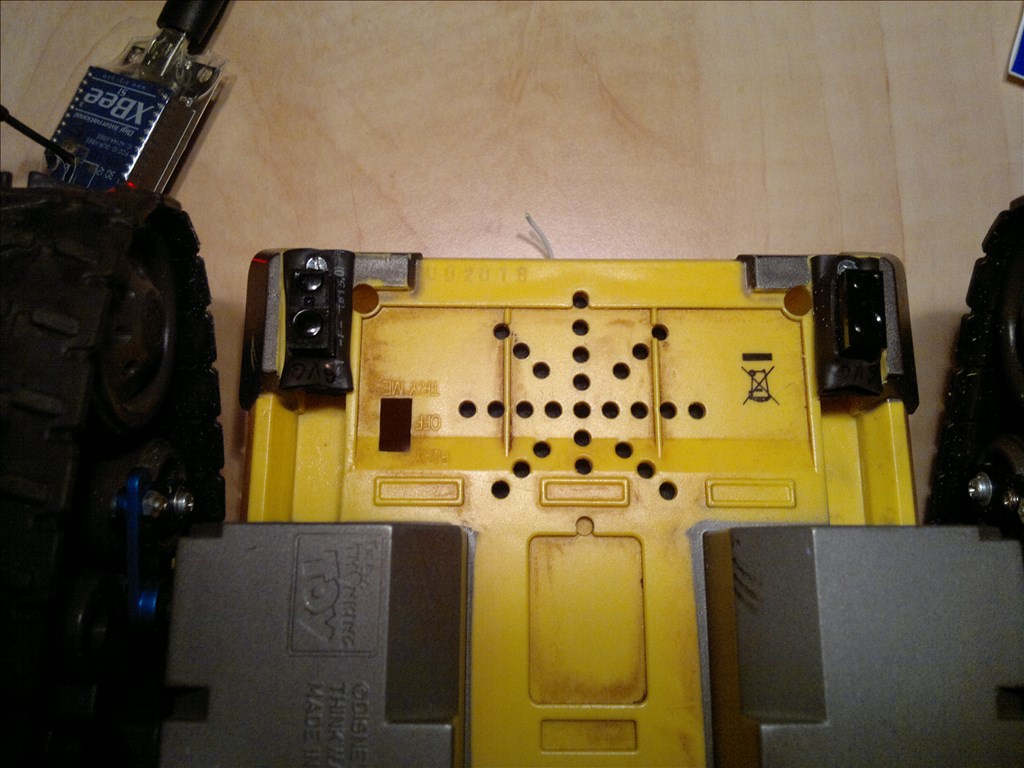
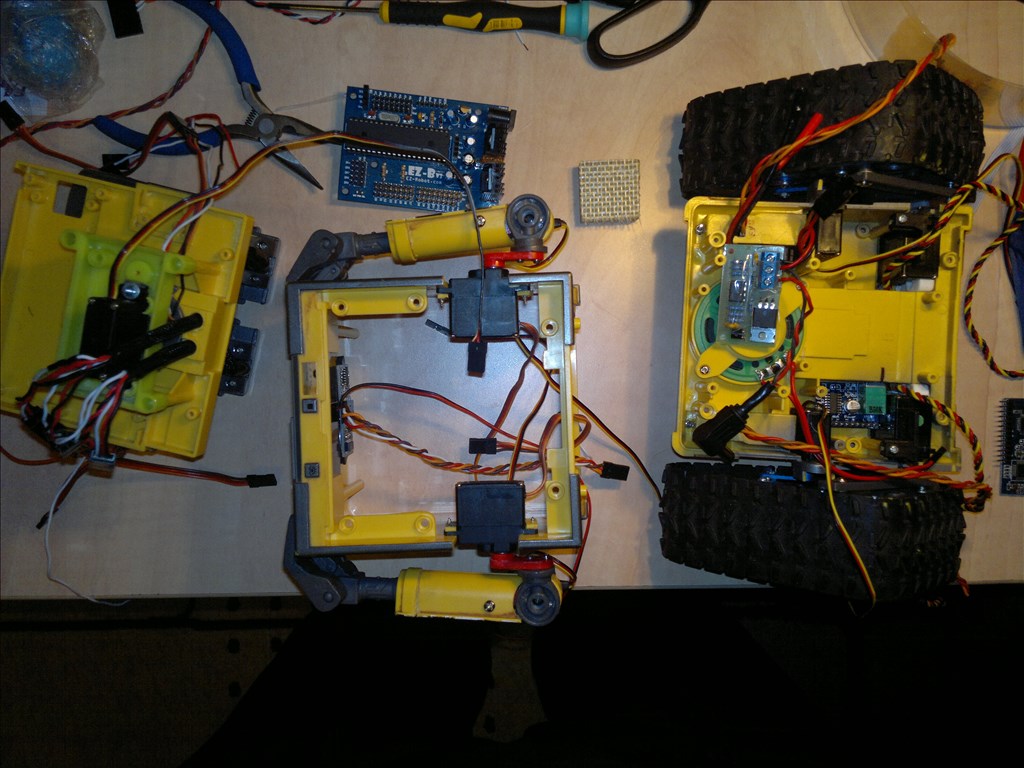
Dissasembly:

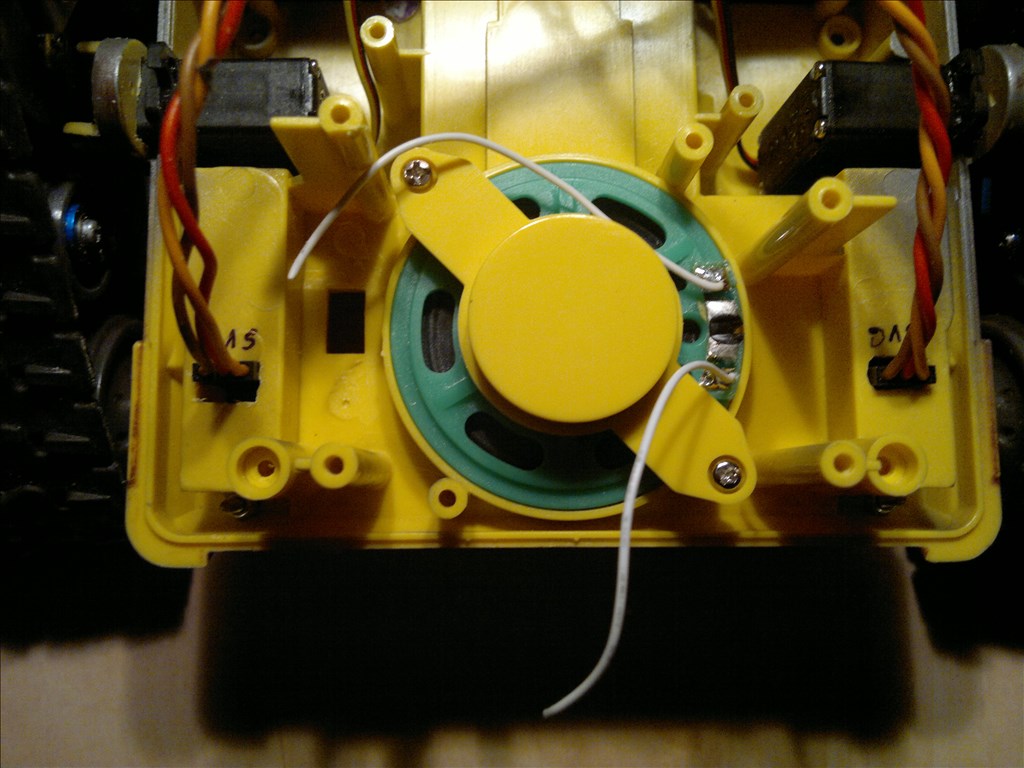
Installation of 1st Floor
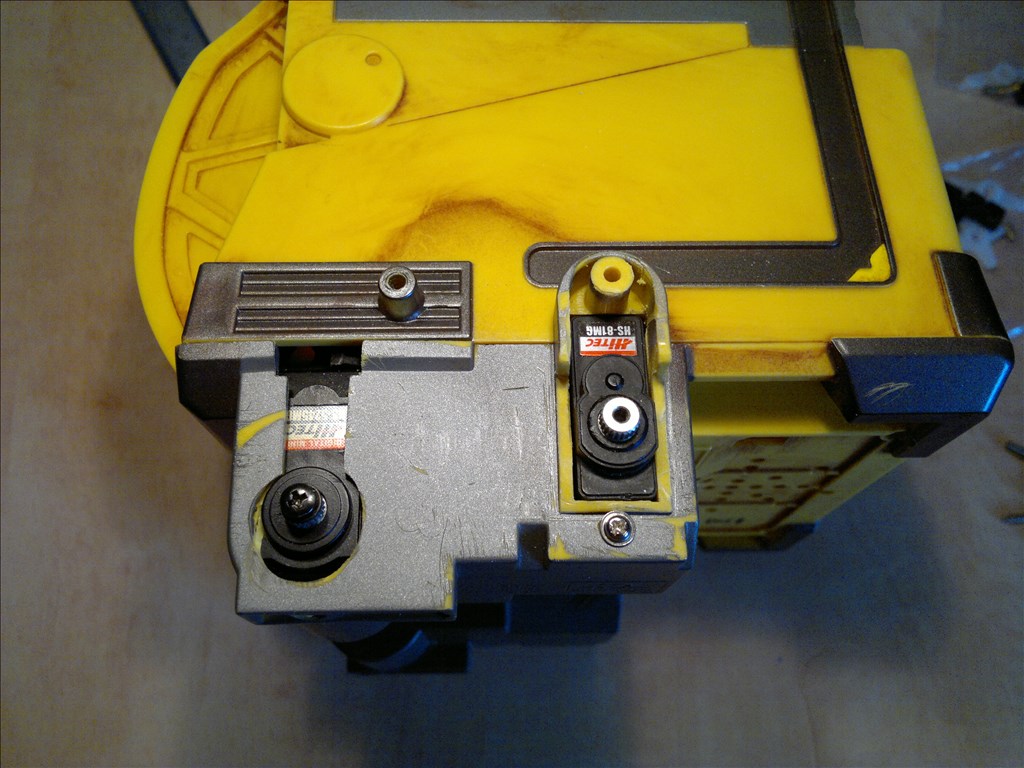



For installation of hands I used little bit different approach then Louis T

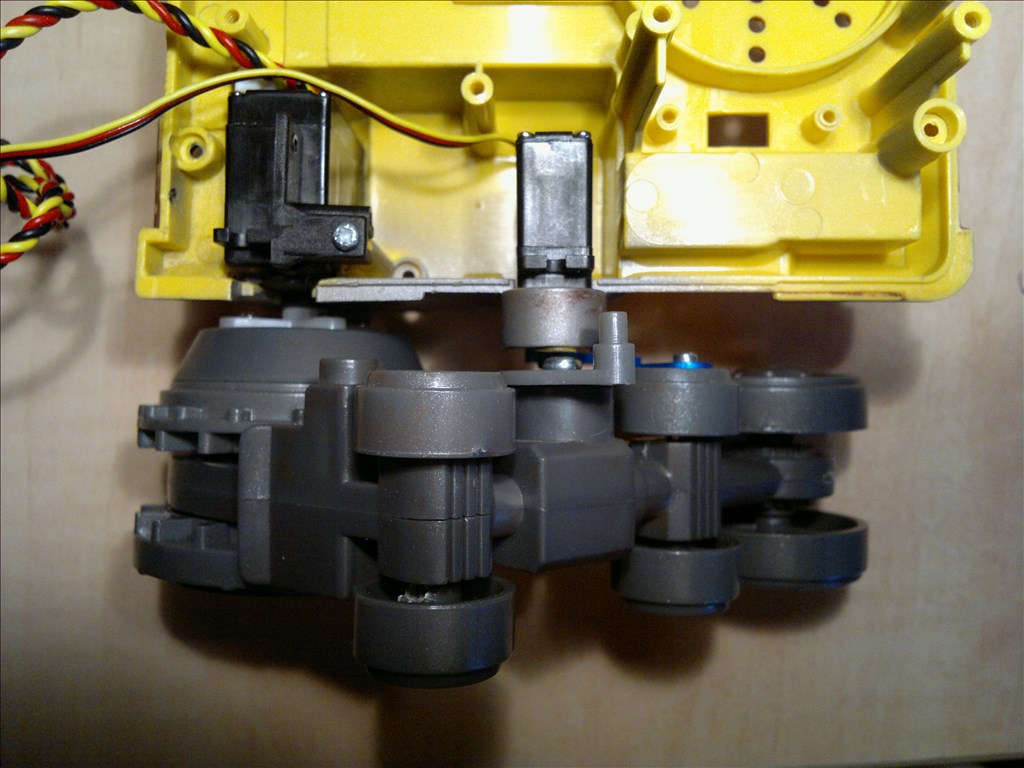
Installation of 2nd Floor



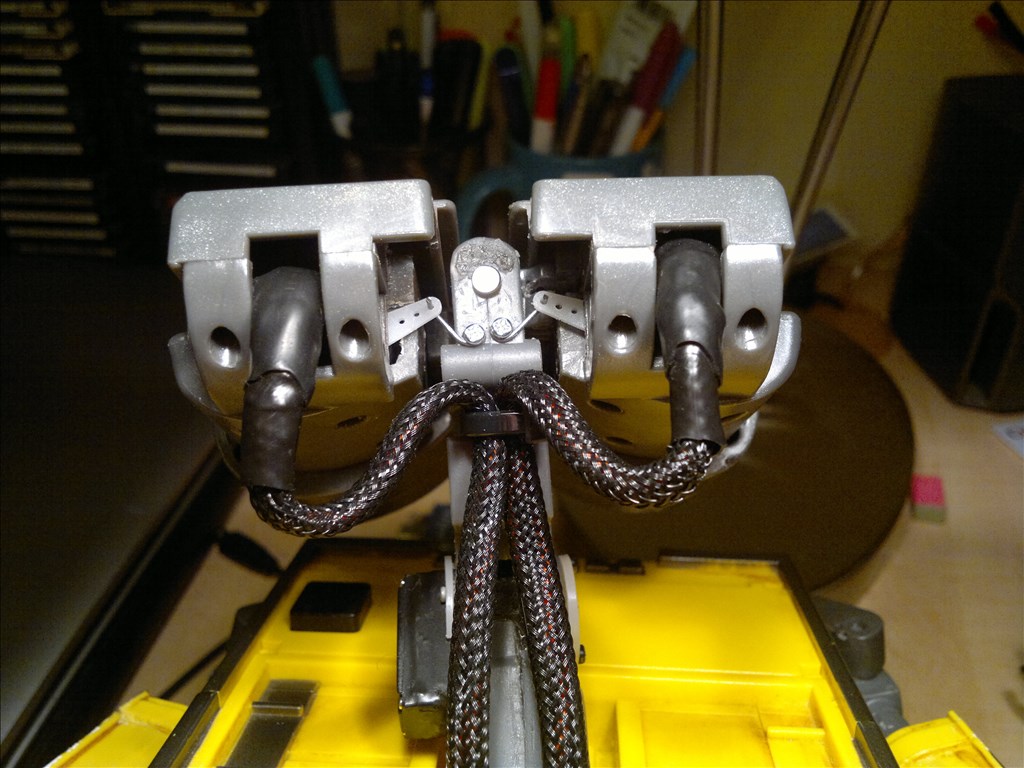
Installation of 3rd Floor and Neck




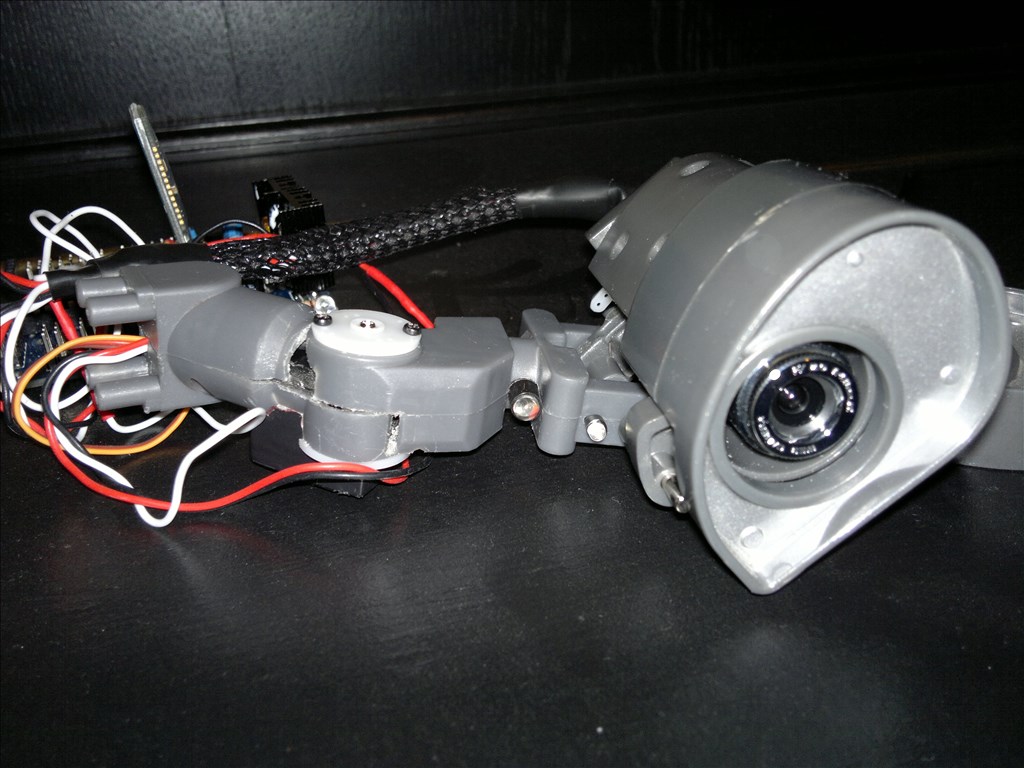
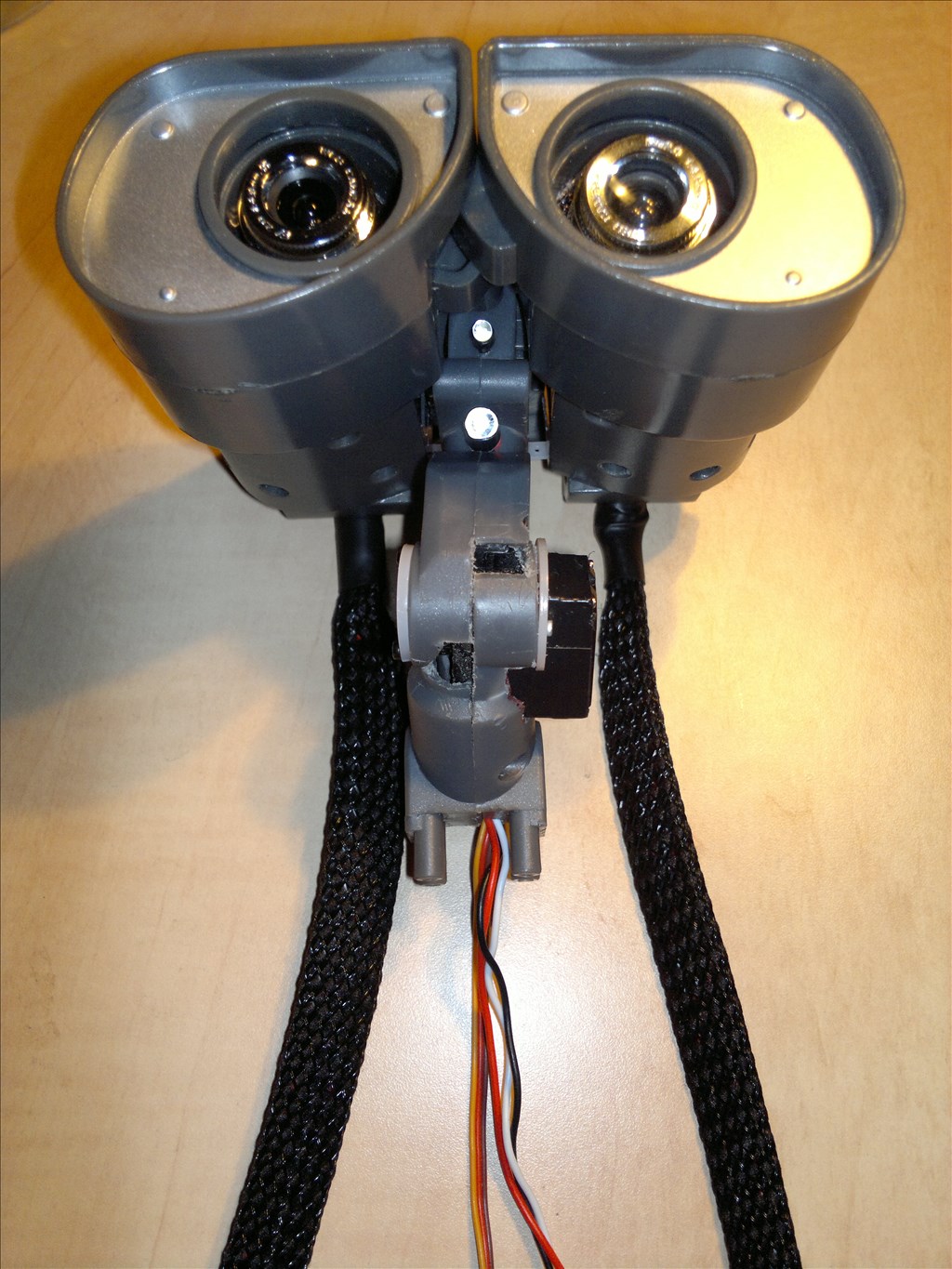
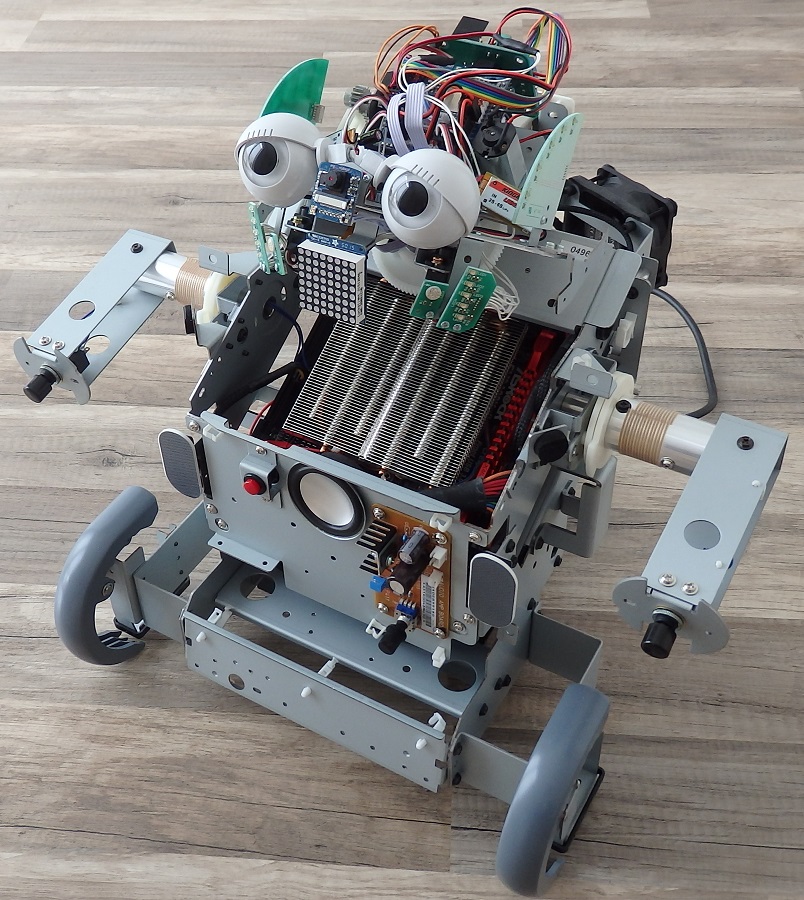
6.Installation of Head with Eyes





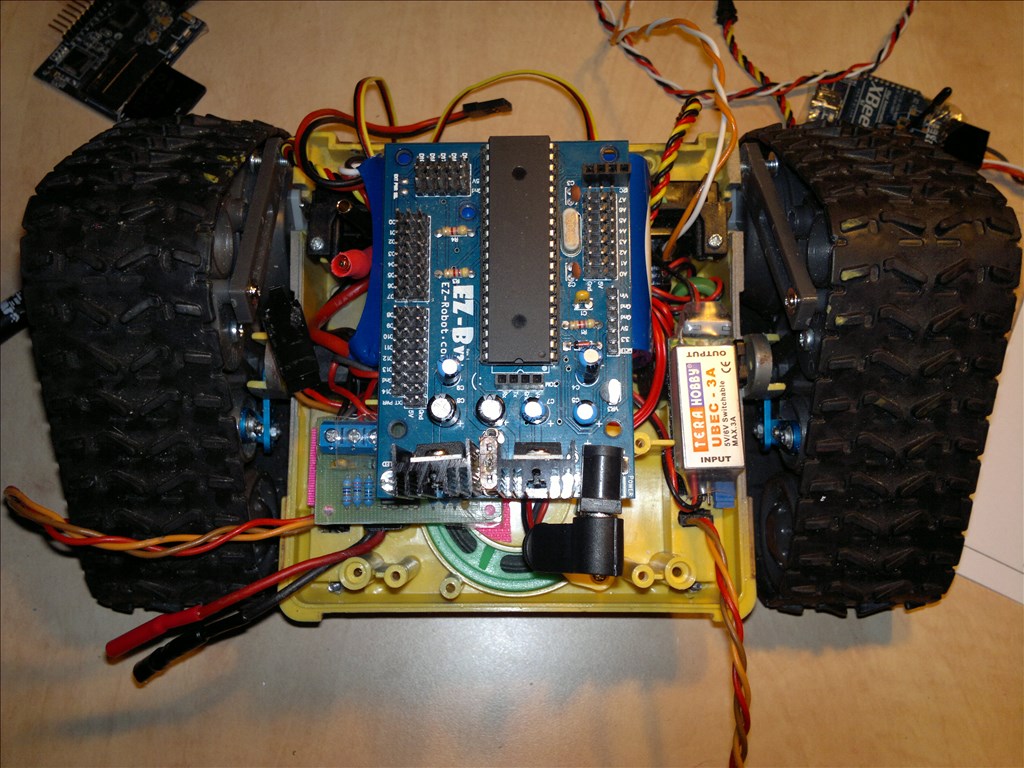
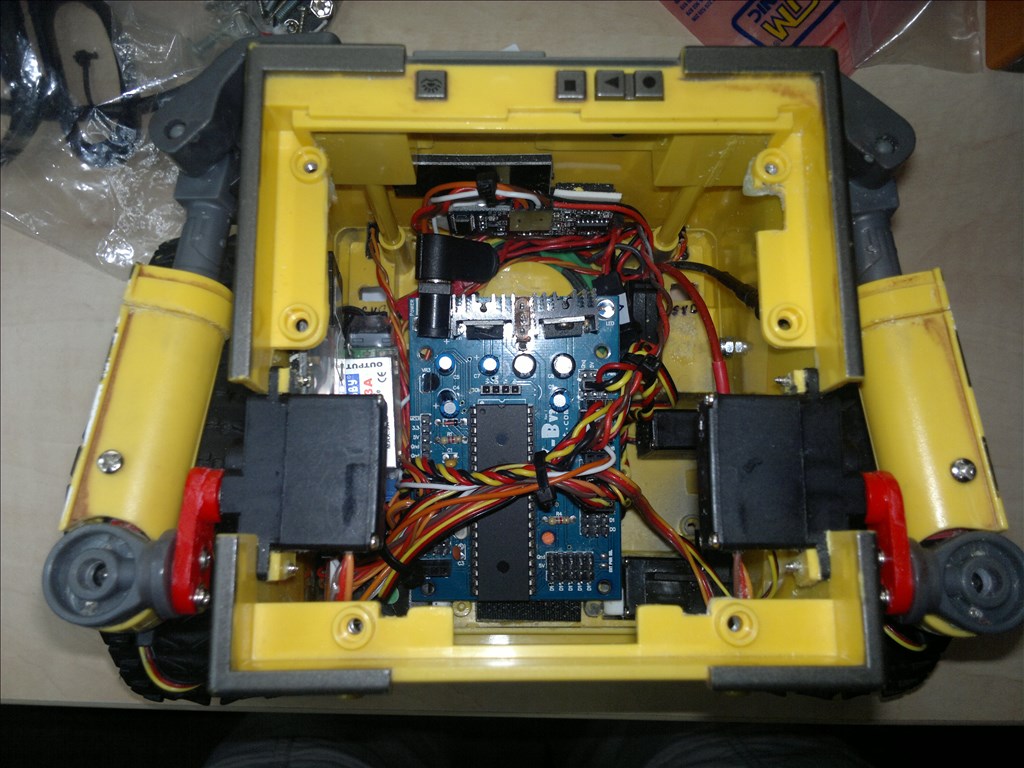
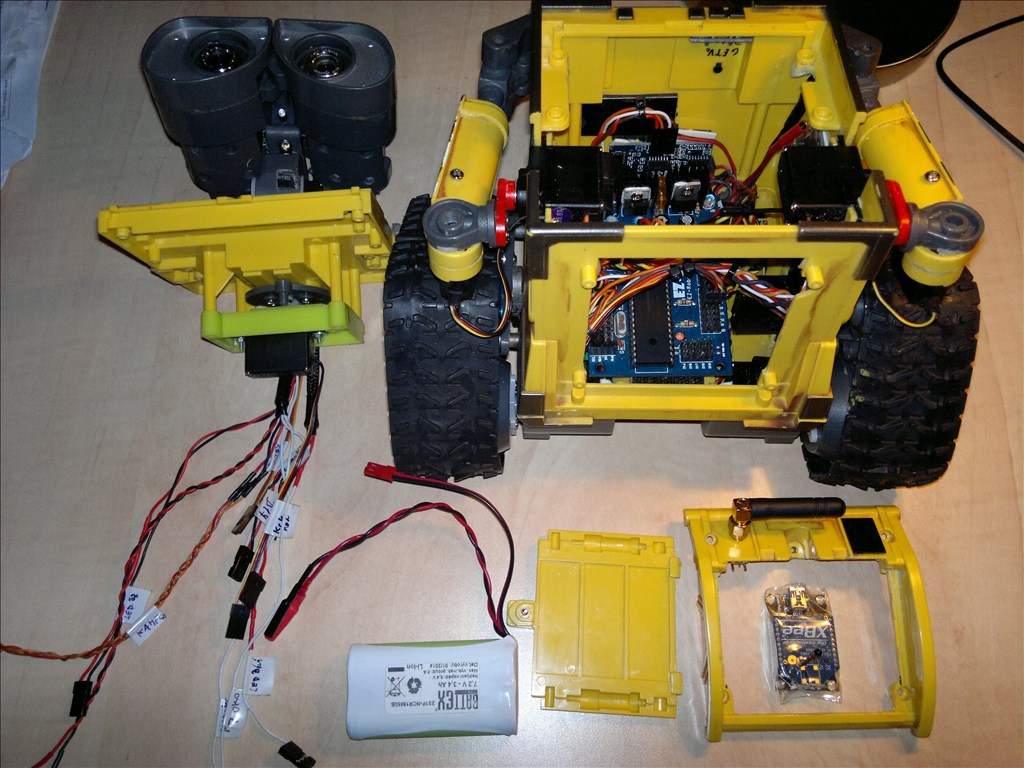
7.Electronic circuit installation

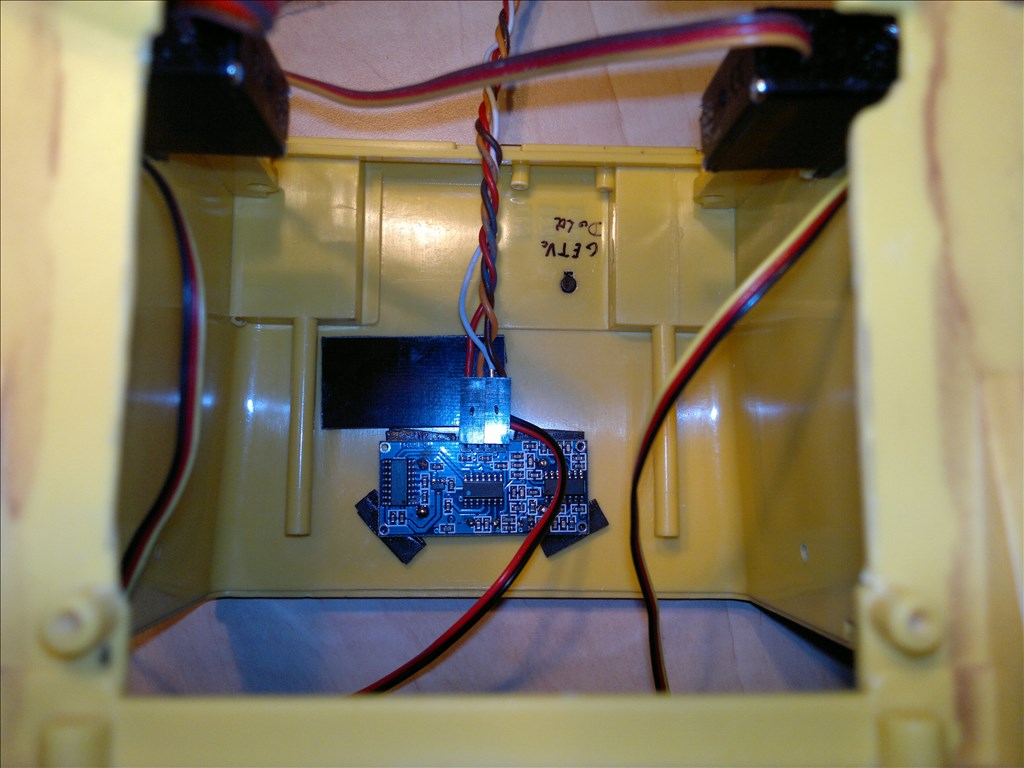
First proposal was not good
Accu was too big and heavy

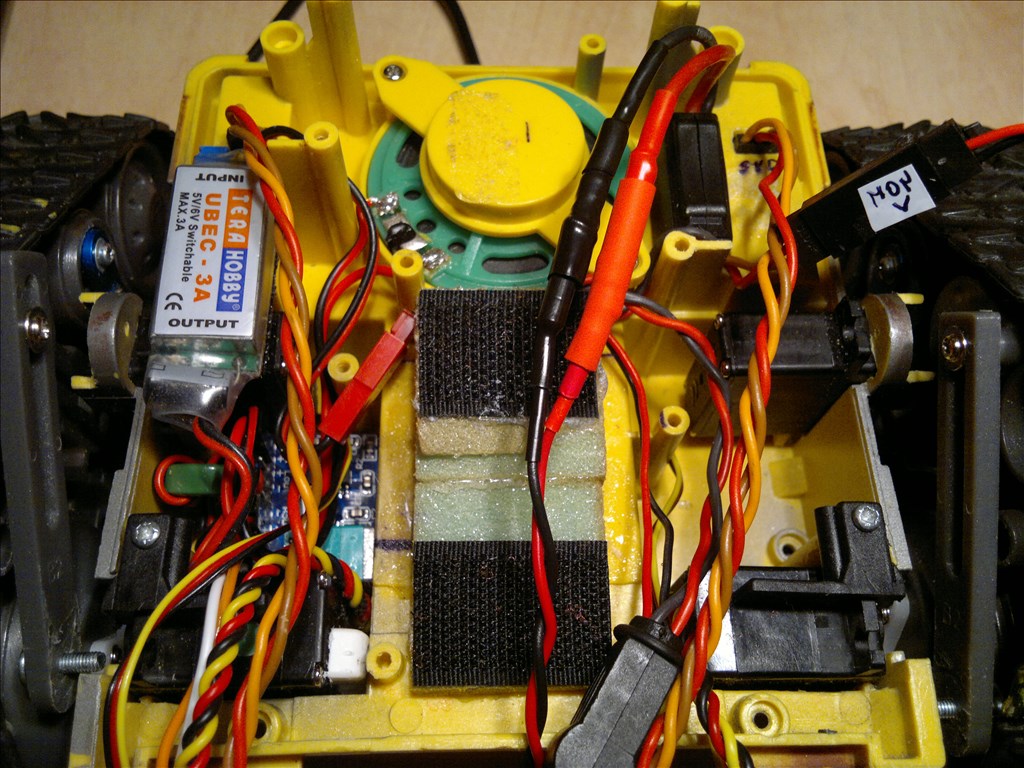
I had to find another solution - smaller 2 accus LiIon 18650 Panasonic 3,4Ah cells with protection circuit

Smalll update of Head -Eyes moving
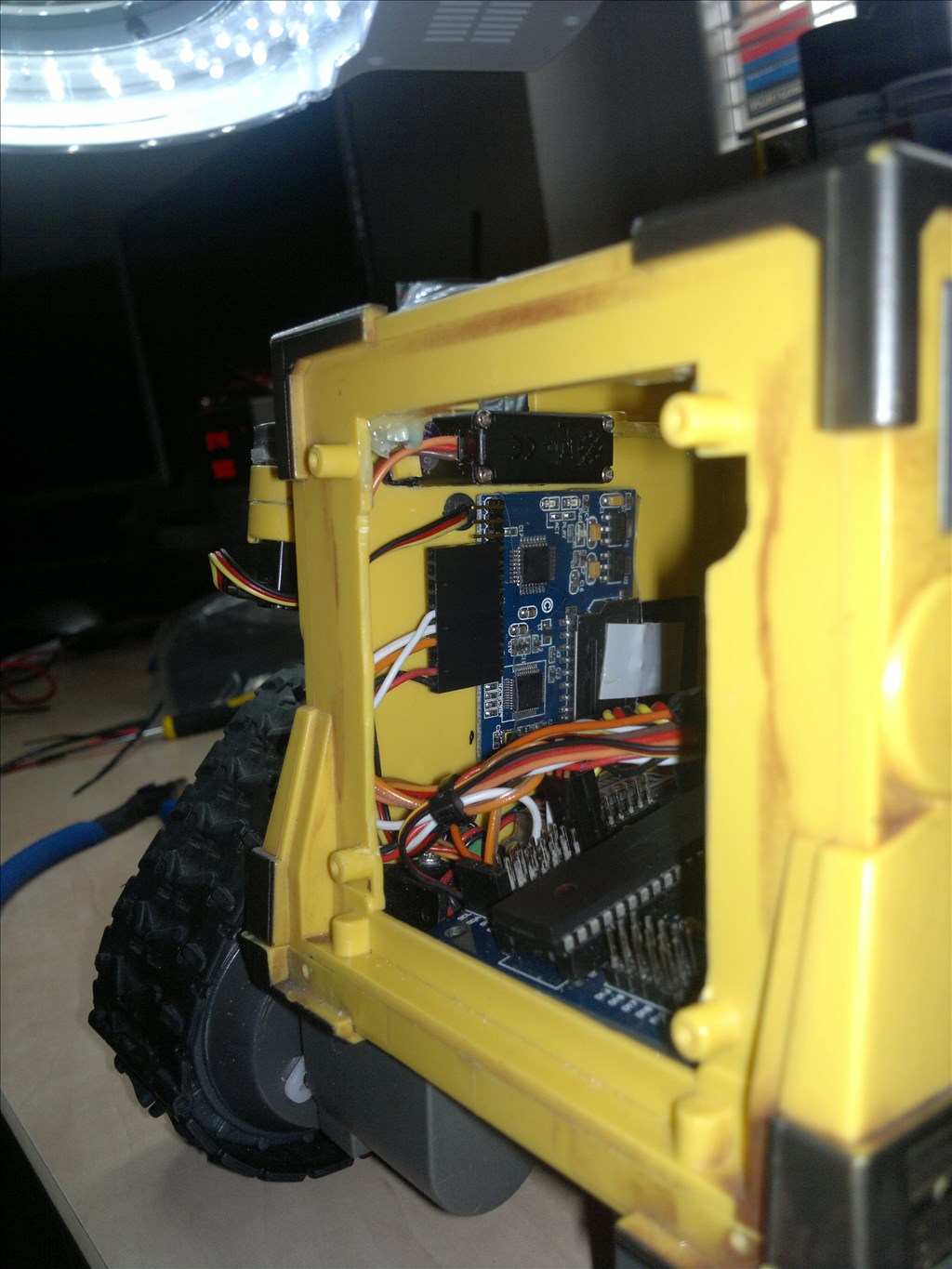
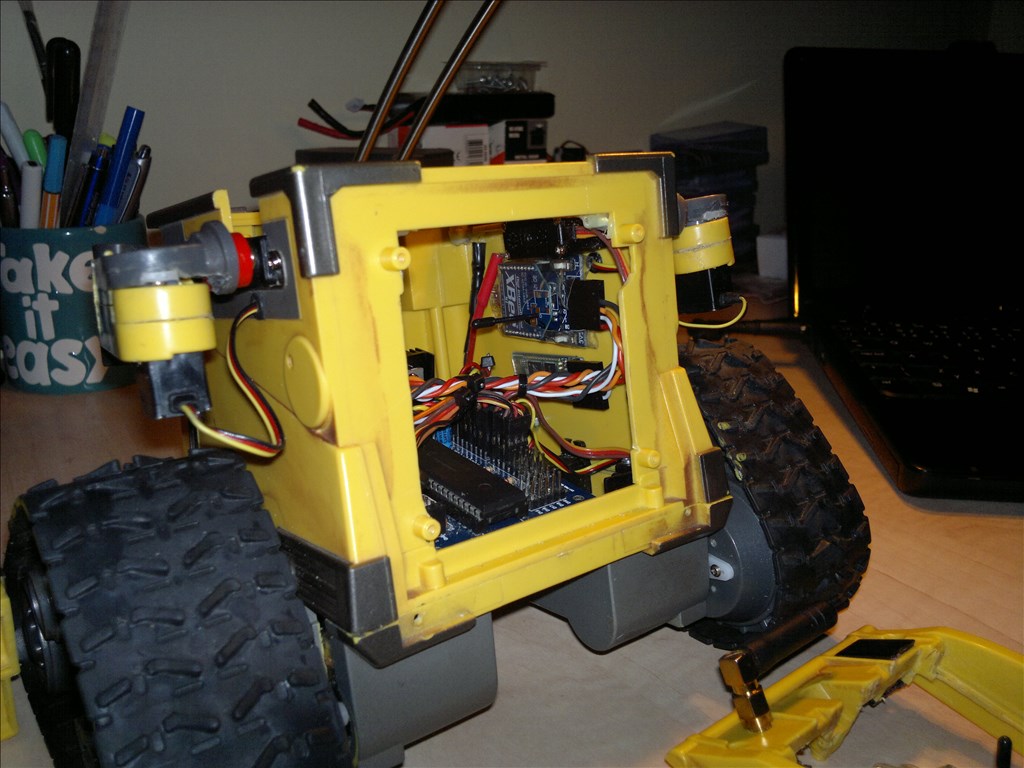
Better solution with final placement of cables, mp3 circuit, comm BT
First charging process
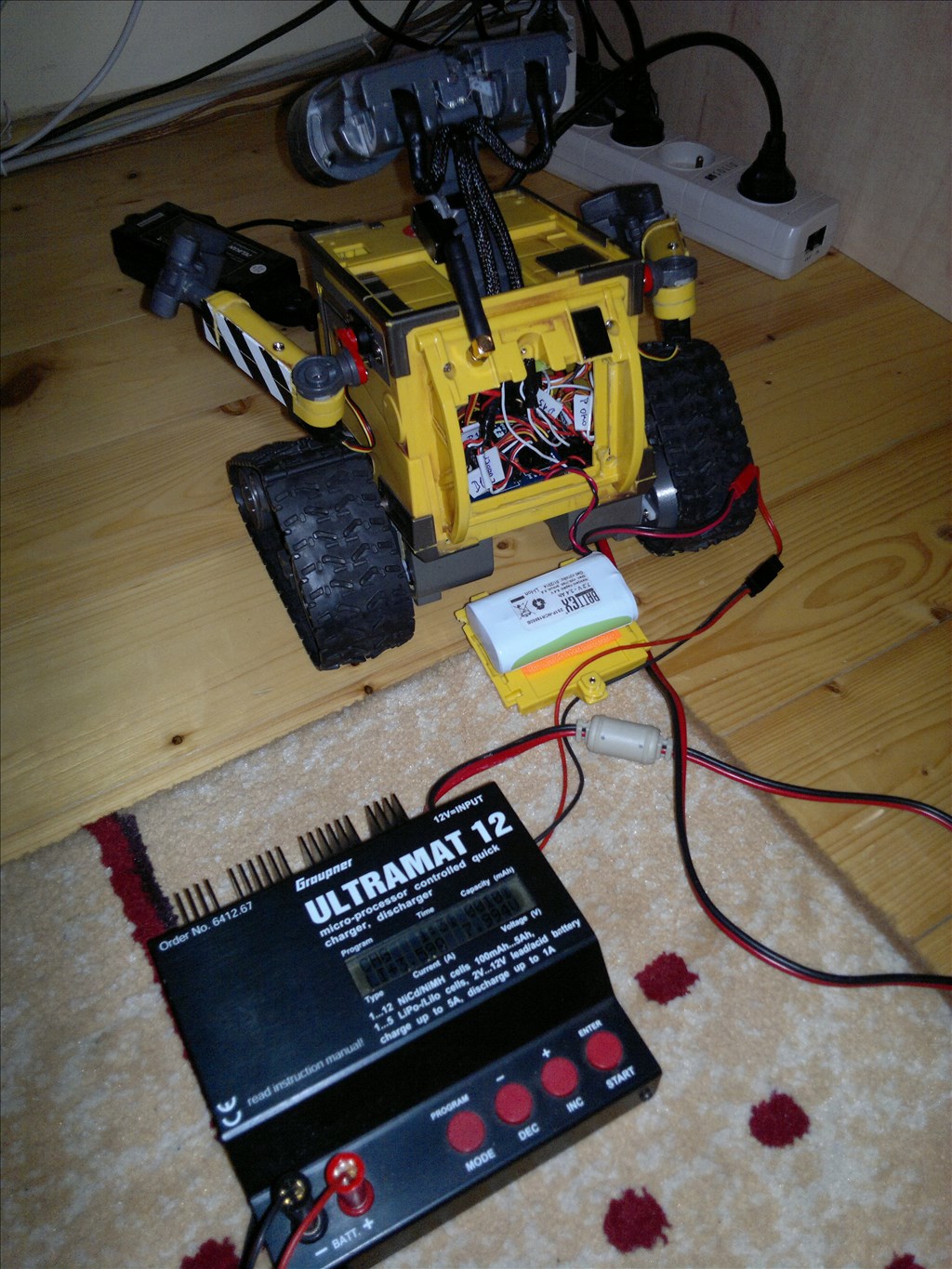
Charging connector and Wall e looking at my son

Video with Wall-E object recognition and sensor tests will follow...
Discover more robots
Smarty's Combot - The Ez-Robot Computer System

J's Robo Arm


Adria's Wall-E is cool. Different model and different brain - arduino, but really cool. So. I used servos from hobbyking and from my old flying models. Hitec is expensive, true, but reliable. For moving of wall-e, head tilt and rotation is used servos with metal gear, complete metal gear. Digital servo version is not important. I used both analog and digital too. HD are good servos. But they must fit into the reduced space of robot. Please carefully check the servos dimension. Shops are not always true :-).
I decided to continue in project. I would like to use more IR sensor for obstacles detection from different angles. I don't know why, but edge sensors after upgrade of SW are not reliable. they are very sensitive for different floor covers, carpets etc. I will change them for obstacle detection. I will also develop another behavior models.
Hi Donesvarc, Nice to hear your answer and pretty more great that you would work in it again (_)
Right now, a more or less pricing for me could cost about 400euros. So my question is: How about cost you mount wall-e? Is for have a estimative cost what is acceptable to pay and what is over expensive.
My first block is money and I only have wall-e toy dismounted and prepared to mixing your job and some other concepts of Adria's project.
I'm affraid to waste money and not catch main objective of robot.
and I only have wall-e toy dismounted and prepared to mixing your job and some other concepts of Adria's project.
I'm affraid to waste money and not catch main objective of robot.
Do you have any first advice to me to start and then advance step by step following money possibilities? Due have robot open for much time I belive that would be a problem of dust and damage few components installed. I suppose that start for microcontroller + batery + main motors of wheels could be a possibility and then add motors every month or like that...
Also problem to do like this is travel costs of each online-shop; so I don't know what is best... Wait to earn all money and buy all, or buy in 2 or 3 times; to could afford more quick and could work through earning for new buying?
Sorry for writting you often, but is my first robot working from 0, learning through internet + some books, and I really appreciate your experiencies and from other buildiers to avoid errors and could done this wall-e experiencie that I'm so enthusiastic to do. blush
Following your project and news every month! I hope you have luck with edge and obstacle sensors. Also add some soft rubber or cardboard couldn't help you for this matter? Have a nice day!
I think it is important to find the right servo drive belts and neck motion of the head. For others, it's almost one. Definitely pay attention to consuming drives, arms, neck, lifting belt drives. Servos must be metal. The dimensions of each servo needs to be measured.
I have built Wall-e with MCU V3. V4 is now easier. Anyway, it is necessary to solve the cameras connected to the MCU to fit the cabling into the braid.
Due I found some buildiers of WallE's I created a facebook club to try to join all people involved nowadays and share open information, photos, and ideas.
WallE buildiers club -- . https://www.facebook.com/groups/790473184415755/
As a reference of walle buildier, I want to invite to participate to this club and also people who has participated in ezrobot forum.
Hi Donesvarc,
I am very impressed on your job so I decided to follow your steps.
The first thing I am trying to figure out is the camera.
Can you provide detail product info of the camera module (manufacturer, model name)? I want to use same product because most of cameras that I've found doesn't fit into the Wall-E's eye.
Thanks
Camera is original from packet ez-robot v3. But you can find it also on e-bay pages or DX.com - KTZ-100MB.
2.4 wireless camera