
Hi DJ
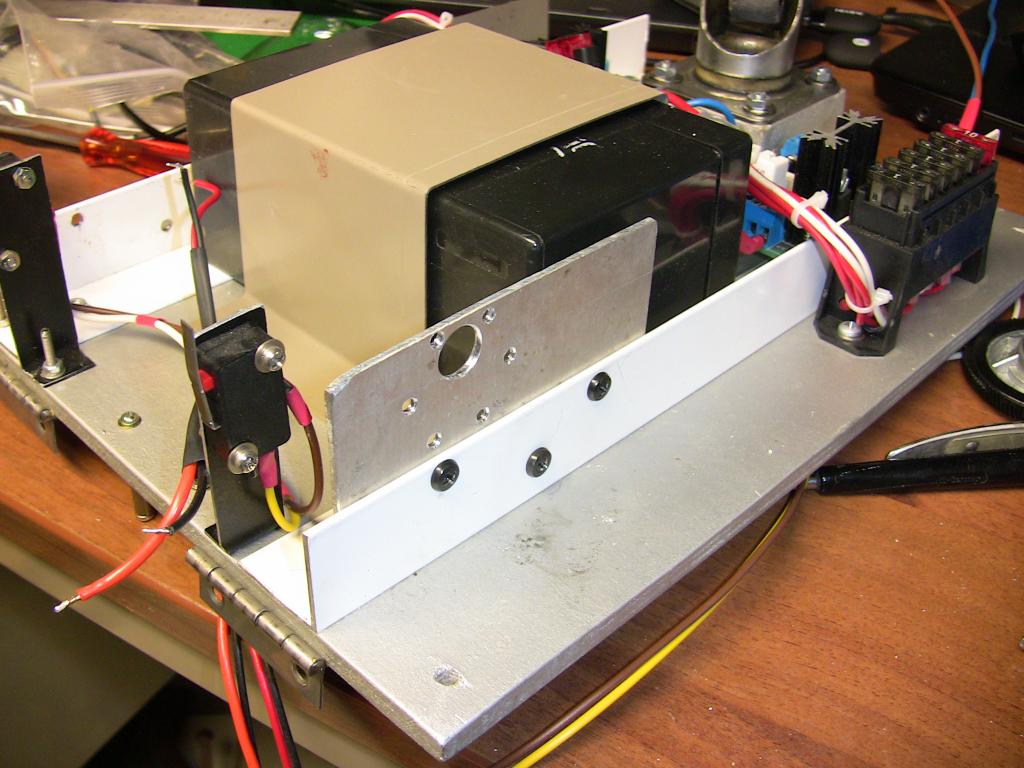
I've been working on a prototype and I guess it's about time to share some pic's with you and everybody else. I started off with the idea of building a robot with all the old pieces of earlier projects and see how far I would get. A bit like Bob " Built On Bits". Eventually I could not resist buying new parts, especially the EZ-B.
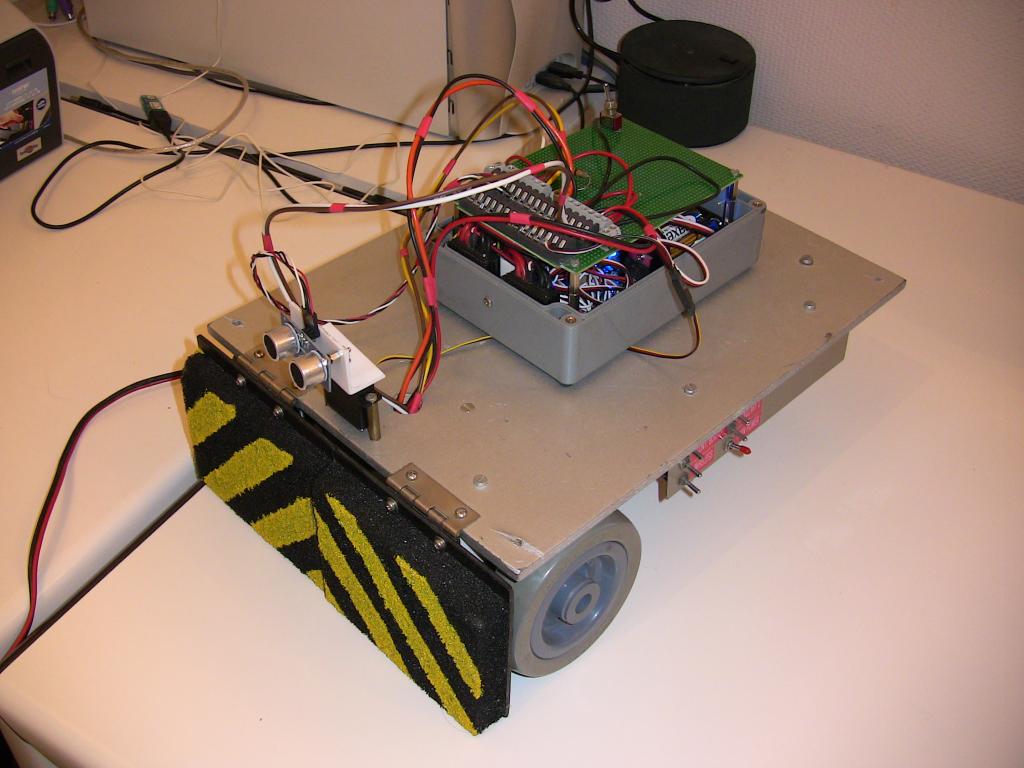
I named it : Verrop (Versatile Robot Platform)
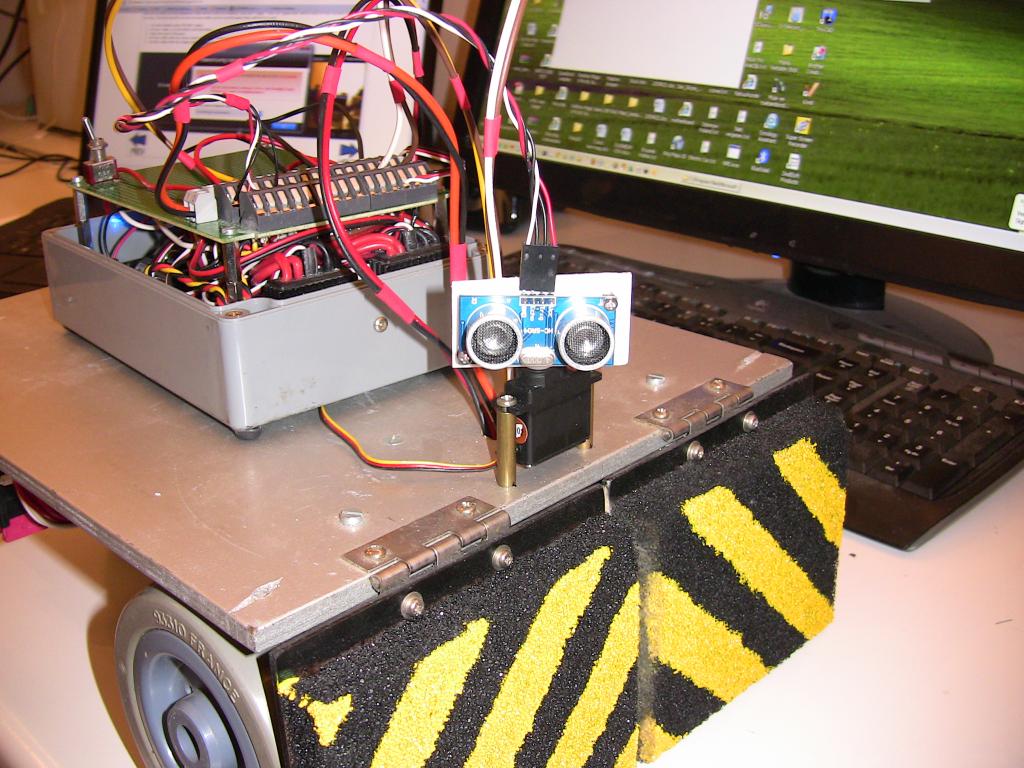
length = 36cm / 14.2 inch width = 26 cm / 10.2 inch high = 20 cm / 7.9 inch
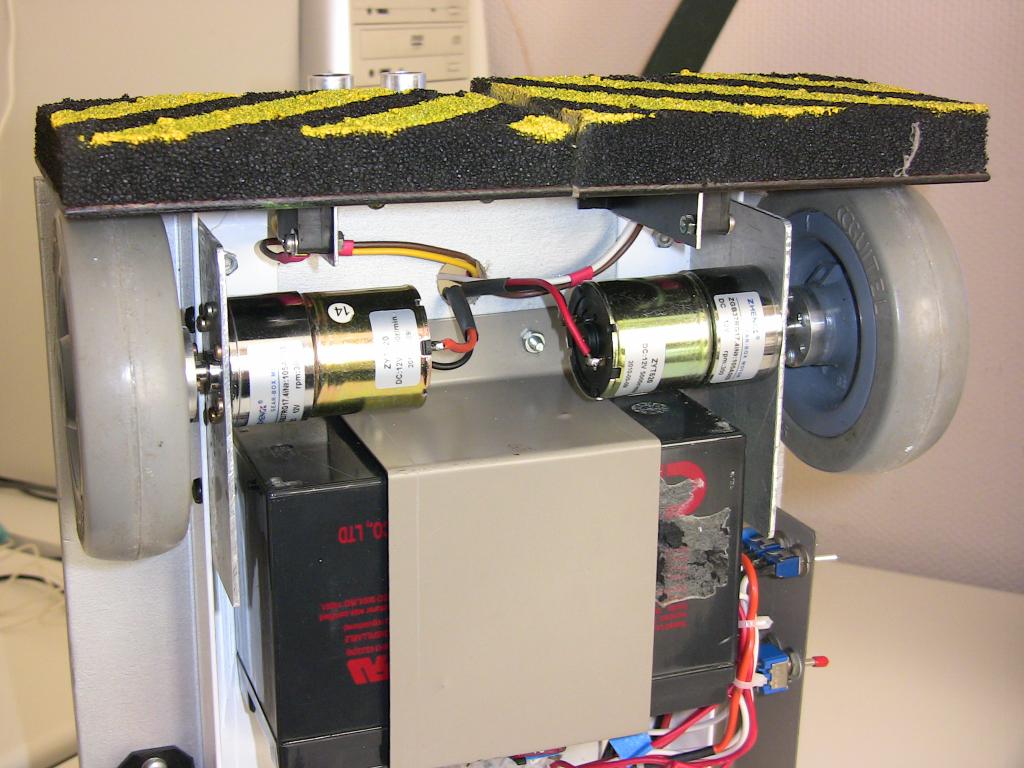
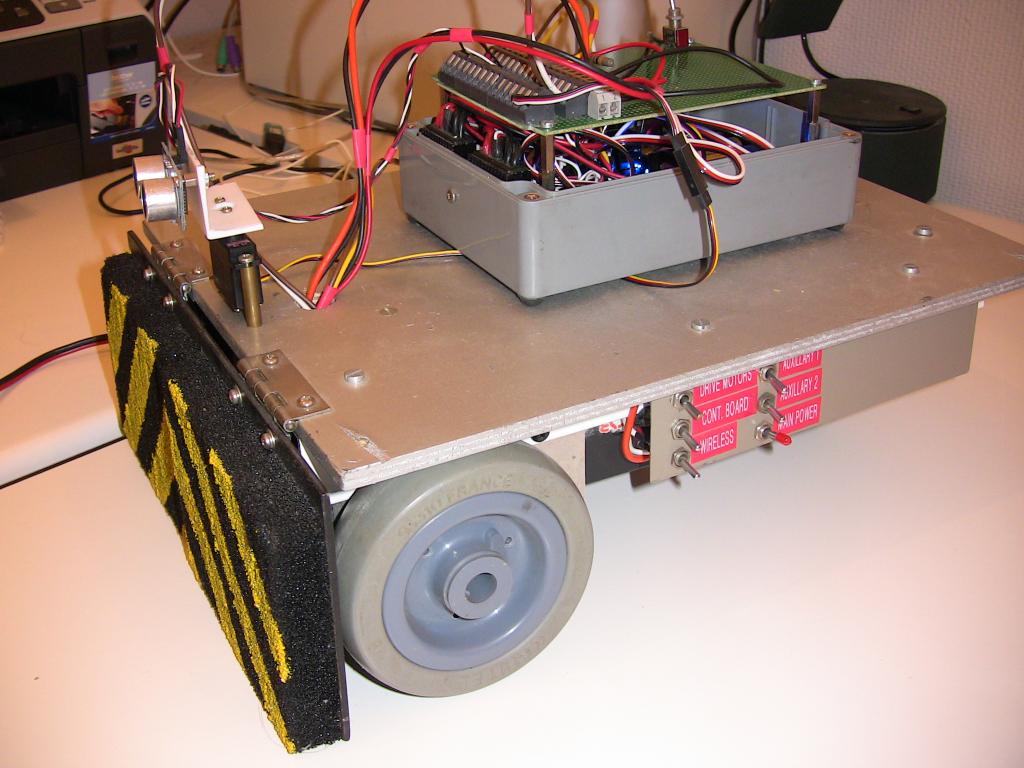
The drive motors runs on a 12V SLA battery, controlled by ESC's. The EZ-B has it's own battery pack. Next thing to add are IR proximity sensors. Right now, I'm working on the control software (VB2005 - 2008). I guess I'll be able to upload this aswell withing a few weeks along with a video.
Best regards,
PhG
Discover more robots

Ericez's Droid For Theater Robot Contest
Sbesk's First Ever Robot. Ish


Adding the links and pic's might be a good idea:
https://www.flickr.com/photos/phg1961/7658692598/in/photostream
https://www.flickr.com/photos/phg1961/7658695334/in/photostream
https://www.flickr.com/photos/phg1961/7658696206/in/photostream
https://www.flickr.com/photos/phg1961/7658702478/in/photostream
https://www.flickr.com/photos/phg1961/7658693446/in/photostream
PHG you have made a solid robot with a low center of gravity, it would be easy to extend your ride height and head and arms. I like the hinged door contact sensors, using everyday objects and adptarlos always a great idea. You see a building clean and tidy, congratulations.
@R2D2
Thnxs ! Yes the idea was idd to have a very low gravity point. The SLA does the trick rather well. When you look closely at the corners you'll see 4 holes through the base plate. This is meant to add one or two layers and install additional hardware. However this is my platform to develop software/algorithms. The lager model is in progress. As soon as I have the software suit (more or less) ready I'll post some screenshots and upload it too. Btw, you too have nice examples. Especially the dust bin I like very much. I had a similar dust bin robot in the mid 90'ies which got me a medal for best design. I still have the interior, the bin itself is long gone. I'm looking forward to more of you posts, I think there very interesting. Keep up the good work !
Cya
That's a super heavy duty robot! It looks like it'll compete in robot games
WOW, congratulations ! this is a project that I like !
Thanks to share with us !
Michel from Canada
Thanks Michel,
Next thing that I would like to post is a software suite that alows you to control several things at once. I hope to post a small portion of it within the next couple of weeks (months), let's say a joystick to control the robots motion. It already works half, but from time to time my computer acts a little strange. Anyway, I'll let you know real soon !
Greetz,
PhG
Looks like a very good robot platform. Very cool. Hope you upload some videos soon.
Yes videos would be great