














I've been thinking a lot about how I should post my Wall-E. Whether to post the finished product and possibly a video of a dance routine or to show the work in progress. I decided to show the work in progress and my plans in hopes to give ideas to others. And also because updates may be in long intervals.
I dont have pictures yet but will soon.
Here are my plans I want to implement.
Articulate each eye using 2 HXT900 servos. Its possible that the smaller SG-50 will work too. (Completed)
Articulate neck vertically in two places using HXT900 servos. Completed. In hindsight I should have used a stronger servo at the bottom. The additional items added to the head puts it at its limit.
Give left and right movement greater than original. (Completed)
Install a pinhole type camera beneath the head. Not inside the eye because of #5. (Completed however I havent received the receiver yet so I dont know if it will work right) UPDATE Doesn't work right.

Install BlinkM LEDs inside eyes.
Make arms move up and down.
Make arms telescope in and out using flexible pushrods. (Complete...kinda...still working out servo placements.)
Use tamiya dual motor drive. Why you ask? I want to play around with the gearing so I have enough play in it for #9. (Partially installed. Need to order a hex rod to extend the driveshaft.) UPDATE I fixed the drive shaft but in hindsight once more I could have used a modified servo and it might have worked.
Make Wall-E be able to tilt forward and back like in movie. I think this may enable him to move the front of his tread in a foot tapping motion. Hope that works. UPDATE Completed. works like a charm.
Sound capability for voice clips.
High capacity battery pack installed very low to prevent tipping. (Completed)
LOL Maybe some EL wire underneath for that ghostly glow.

I feel like I forgot something. If I remember I will edit the post.
Thank you DJ for EZ-B!!!
....and thank you to the inventors of the Dremel tool and glue gun!! Both god sends!
Discover more robots
Drephreak's New Robot

Kenny's Aiwabot


I'm currently working on Wall-E's feet. It seems to work ok. I just need to refine the clearance between the servo horn and treads.
Here he is just straight and level.
Leaning back...
Leaning forward...
and my favorite...one toe up...
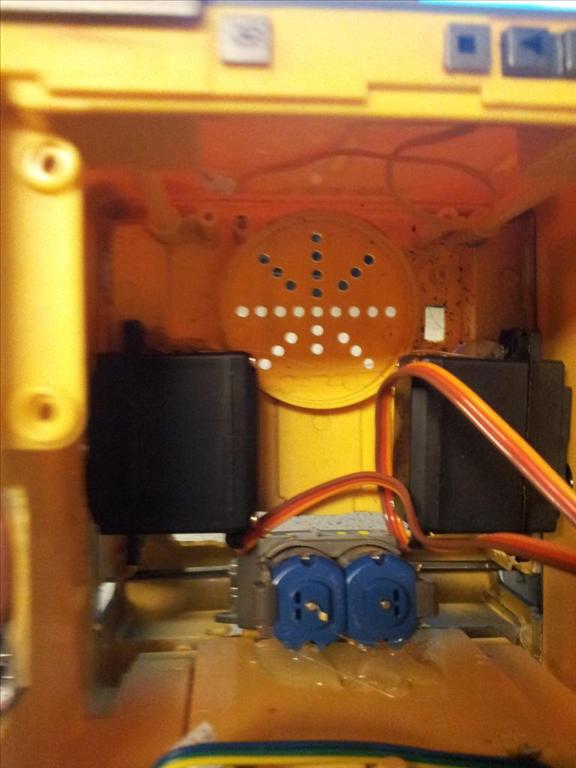
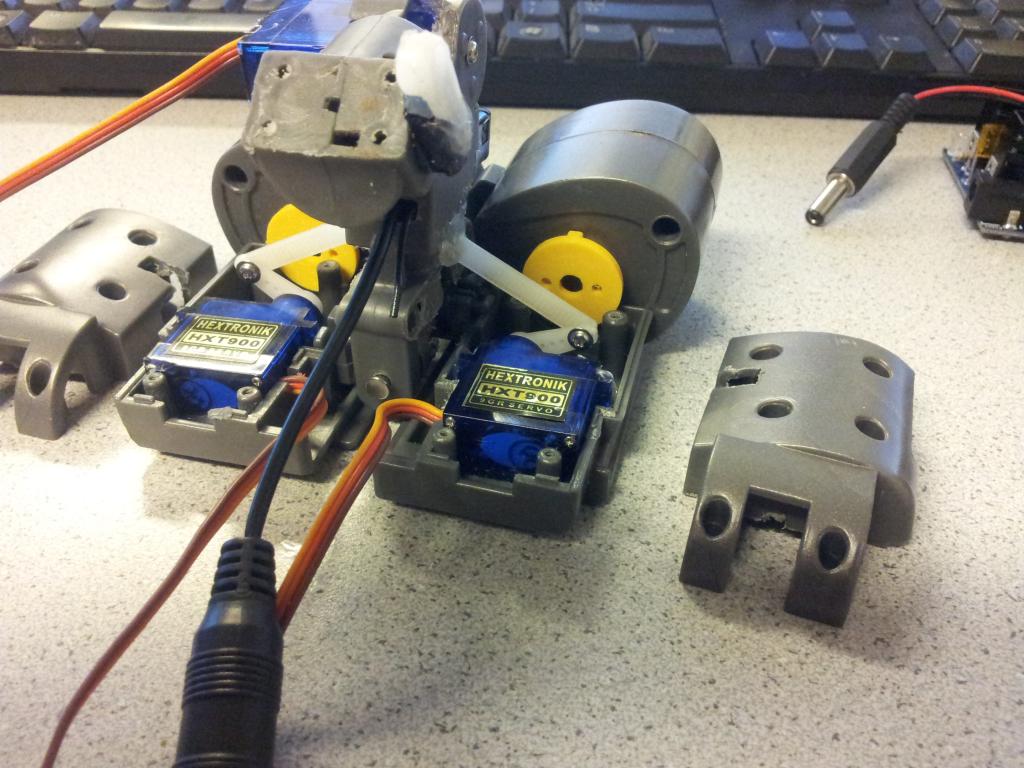
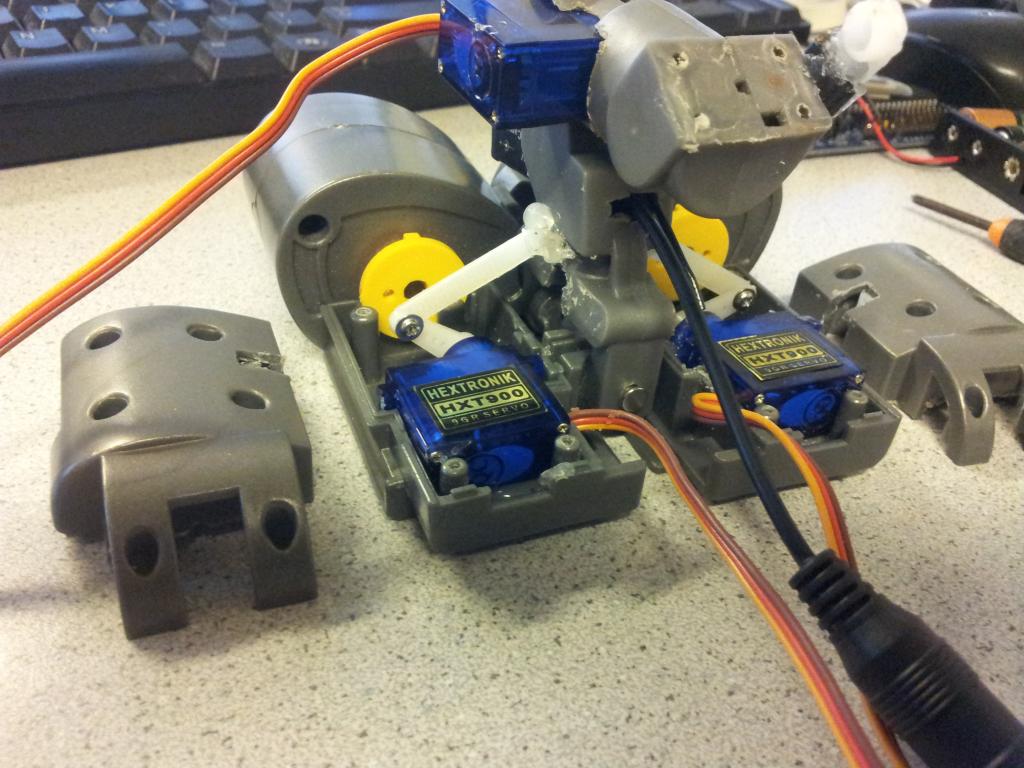
Here are the servos inside with modified tamiya drive...
Here it is with the track removed so you can see how i attached the servo horns. The vertical one is hot glued to the free spinning wheel on the "foot" to act as a pivot point. However i should have added 1/8" spacer first for clearance. I will fix it when i get a chance this weekend.
Im hoping this gives him the personality and choreography possibilities I want.
I fixed the pictures from previous post. I hope it helps the idea pool.
Wow! Toe up is really cool! Body tilt is now also on my list! I need to get it in gear!
IM DOING THIS, IM SOOO DOING THIS.....
My problem is i dont have the u command wall-e i have the stupid disney store remote wall e
same size diff tricks.
eyes dont articulate but the neck moves in and out of the body.....
arms dont go up and down but rather the hand,moves in and out....
so, im copying your idea, but modifying the hell out of it for this stupid wall-e
but great idea....maybe more pics of the arms that tilt him...diff. angles...
thanks man.
Glickclik - thanks for the help...i have been obsessed with this project since i saw it. can you help me out a little?
OK, i see you have to use a h bridge for that type of motor.
I'm assuming you are using the tamiya drive motors for the "slack" it gives while the "tilt" servos moves the body up and down, correct?
can i do this with modified servos instead of of the tamiya drive?
for instance
Servo one and modified servo 2 are both hot glued to the wall-e body
If servo 1 is for the tilting feature (attached to the arm attached to the free spinning wheel)
Will modified servo 2, (attached to the turning wheel) allow the movement?
or will i have to also instruct modified servo 2 to co-inside with servo 1 to allow tilting motion?
my worry is : since both servos will be "on" if servo 1 tries to tilt the body, modified servo 2 will remain stiff (since its not being told to move) thus not allowing the tilting motion.
or
will modified servo 2 allow the motion of servo 1? (again, since both servos are hot glued to the wall e body and attached to the wheels but for different purposes)
thanks.
Ya know I was operating on a hunch I needed to do it that way. I havent any experience on the modified servos. As I think on it, you may be able to use them. Anyone correct me if Im wrong but modified servos are no longer "stiff" when at a stand still because there isnt a potentiometer feedback present. Even if so you should be able to do a servo release command, then tilt. The tilting servo plus the weight of wall-e would easily overcome the gear resistance of the modified servo. I say try it. I will do it that way on my next Wall-E just for simplicity.
What kind of photo angles are you wanting?
GLICK!
thanks for the reply's man,
this is actually why i started the other thread (attaching the servo to the wheel assembly)
ok cool, so the weight alone and the tilt servo should over power the modified servo, and boom! i have tilting.
will this damage the modified servo?
if this works i can abandon the whole, servo ontowheel, idea....
im def trying it.
thanks again for the help and the great ideas....
one more thing.....are you using only 1 servo for tilting? or is there a second doing the same think on the other side o the wall e
as far as angles, maybe a straight on view or top view of the servo arm attached to the free spinning wheel....
just trying to get that arm like yours.....
thanks GLICK!
Just to be clear, you may have to give the release command to the drive wheel servos to get them to be loose enough. That means tilting while standing still too. I am using two servos for tilting. By lifting both feet, Wall-e tilts forward. I hope this helps.
A short video of it in action soon!