
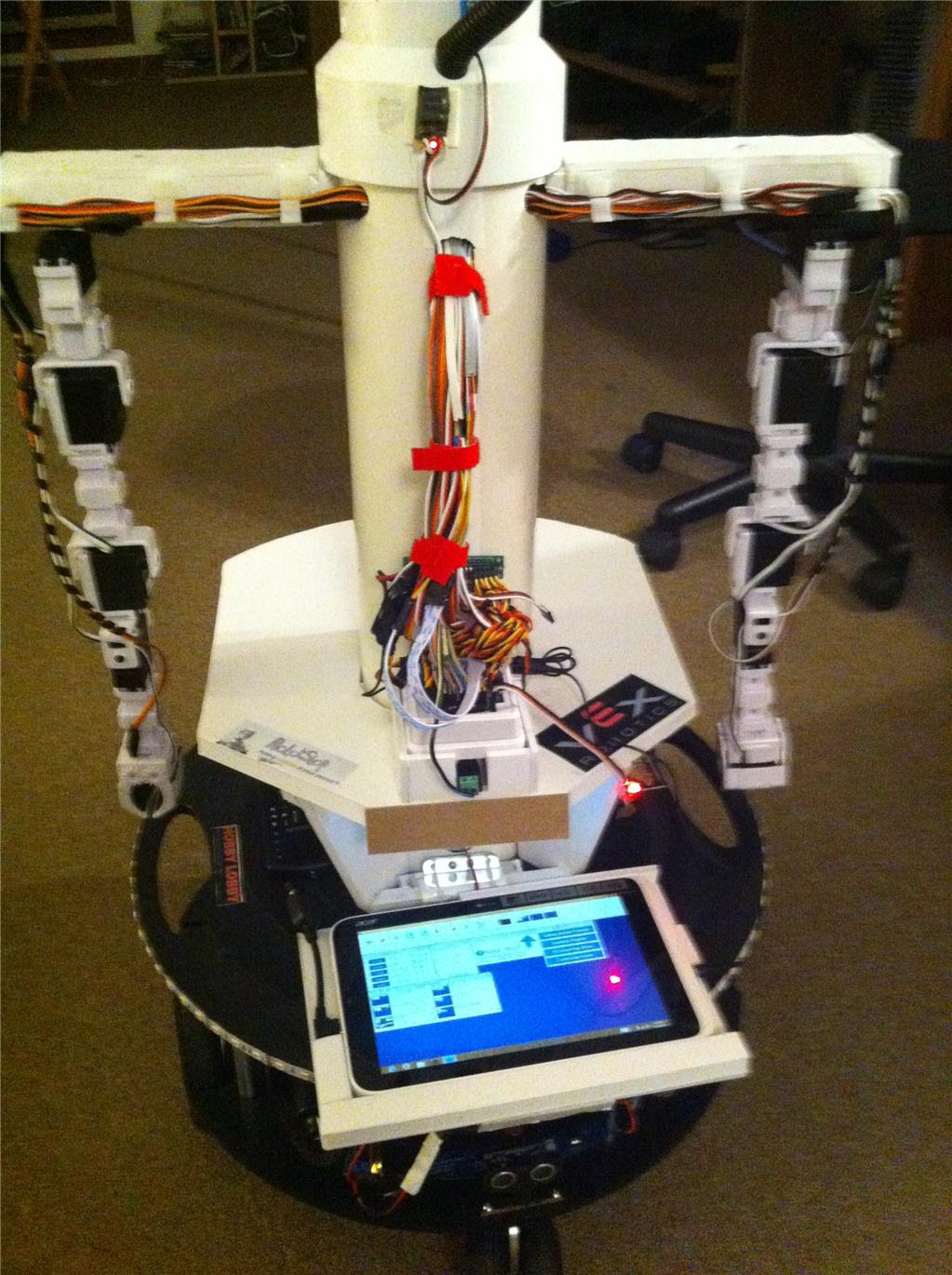
Hi guys, Thought I would show off my robot again. This is Cybot 2.0. The big change I did was get rid of that big laptop of a head and went with something a bit more normal size I think, now that I have an Acer W3 to control it. The head now is just basic speaker,ezb camera, and the rgb animator. Do plan on adding more cool sensors later on.
I hope to do a video of him moving about soon too.



By RoboHappy
— Last update
Discover more robots

David's Humanoid Robot
Robosapien V2 upper-body robot with homemade 7-servo arms and Micro Explorers story about tiny robots that combine,...

Ericez's Rori The Coffee Robot For Movie
DIY low-cost robots and tutorials: donated EZ-Board enabled 3D-printed Rori coffee robot for an Indonesian web series,...
Jstarne1's Levi Rover Modular Robot 3D Print
LEVi Platform latest model - the most updated LEVi Platform available.

Wow thanks for sharing! I'm a huge fan of this robot. Moving the laptop away from the head was such a great idea for the overall personality.
Nice cool impressive looking robot ! Great job. Btw, did you build the base plate and/or drive train (DC motors) yourself or is it a kit from a vendor ? Looking forward to see video's.
Thanks DJ, I appreciate that! glad you like It still needs some tweeking to its looks I think, but am overall happy with it. Would love any thoughts on how to make it a little cooler looking
It still needs some tweeking to its looks I think, but am overall happy with it. Would love any thoughts on how to make it a little cooler looking 
PHG, thank you. the motor/base portion was purchased from Parallax, inc. (and while it runs at a moderate speed, I'd love to add more speed later on). Also, you may notice the various other vender names I've stuck on all over CY. its kinda my tribute to all those who helped make Cybot2.0 possible.
Now the fun part. I've made many little scripts to test out the various parts of it, so next is integrating it all together, and tweek it as I progress. Next big steps might be to add a few verbal responses to come commands, and would like to still work on some touch sensor for the grippers.
When I figure out how to upload to youtube, I will at least show off a few things its able to do now.
To be continued....
Well, here goes, my first video. This is justa short clip of testing the Emergerncstop button located on the top of the head. https://youtu.be/_RaEyn5VlaY
The Parallax wheel base is a great product but for me a little expensive. I've seen it in action and indeed it can go really fast. Nice video.
Thought I would add another quick video. I have couple more on the way. https://youtu.be/GS6OxQOjdi0
A couple more videos. These are just showing off more of Cys movements. Hope you like!
https://youtu.be/KQXua85Dj6k
https://youtu.be/MbEsprFe6Fw
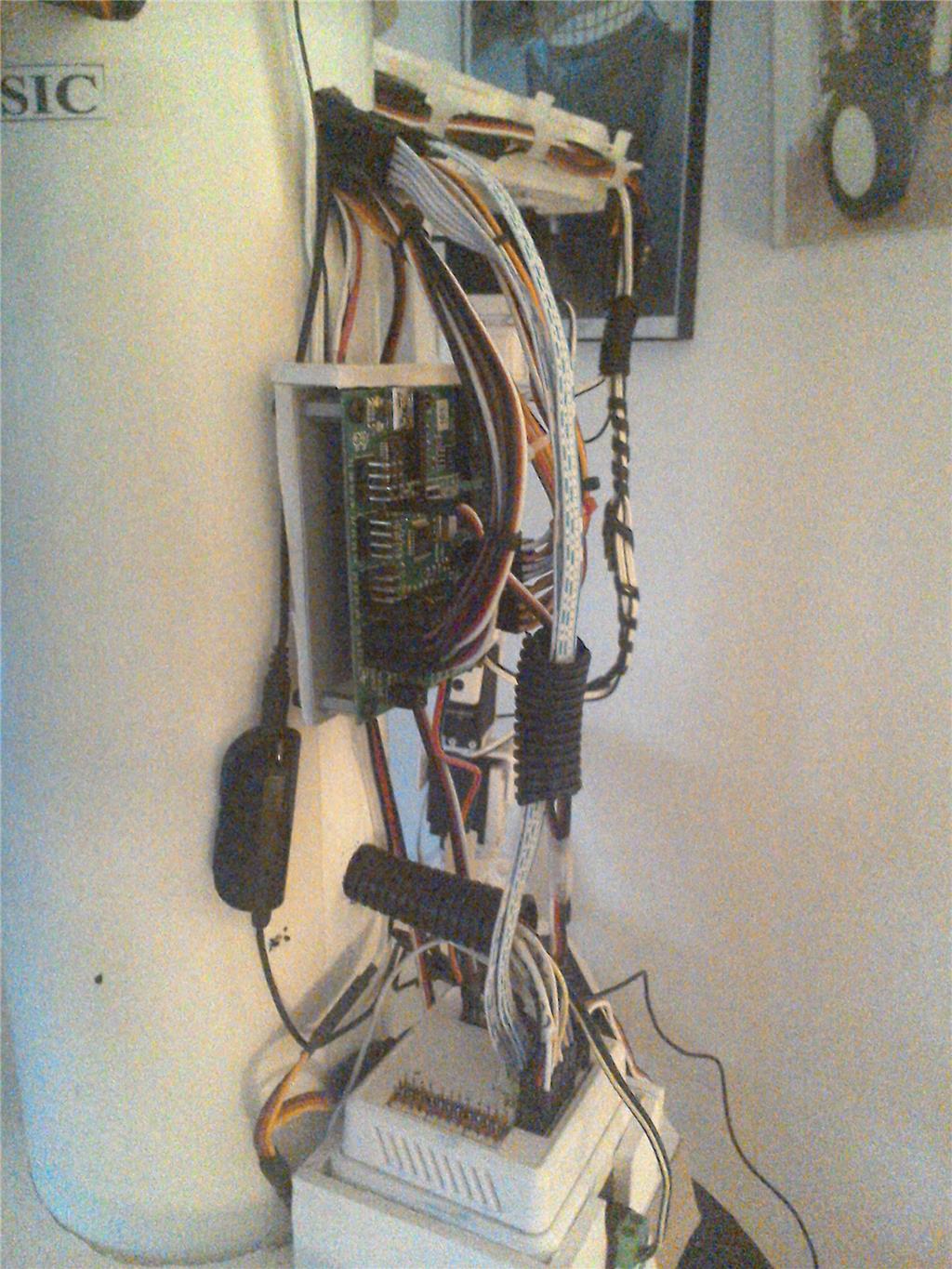
Cy got a little improvement. Since I recently installed the SSC32, I was able to improve the wire management on the backside. It cleaned up nicely and opened up some ports on the EZB for future add-ons (like some of the other sensors Ive seen featured on here). What you think?