

-634918751738750000.jpg)
-634918752058906250.jpg)
-634918752417968750.jpg)
-634918753328125000.jpg)
-634918753552812500.jpg)
-634919384849687500.jpg)
-634919385116250000.jpg)
-634921282099941406.jpg)
-634921282607519531.jpg)
-634921285303984375.jpg)
-634921286081347656.jpg)
-634921286592539062.jpg)
-634921286894394531.jpg)
-634921287070869140.jpg)
-634917821569140625.jpg)
-634917822546923828.jpg)
-634917822752392578.jpg)

-634900401634345703.jpg)

-634912687919804687.jpg)
-634912688173408203.jpg)


-634922231866093750.jpg)
-634922232032812500.jpg)
-634922232710625000.jpg)
-634939426884531250.jpg)
-634941099600468750.jpg)
-634941163205781250.jpg)
-634941163592031250.jpg)
-634941164157343750.jpg)
-634941164341718750.jpg)
-634941924885156250.jpg)
-634941925538281250.jpg)
-634941925705468750.jpg)
-634941925862812500.jpg)
-634922980927968750.jpg)
-634922981092500000.jpg)
-634930603620000000.jpg)
-634930604267656250.jpg)
-634930607122656250.jpg)
-634937753237500000.jpg)
-634937753531250000.jpg)
-634937753872500000.jpg)
-634936811644843750.jpg)
-634936811841718750.jpg)
-634936812280156250.jpg)
-634936812576718750.jpg)
-634936812777343750.jpg)
-634892840812441406.jpg)
-634881851798437500.jpg)
-634888436524687500.jpg)
-634888436834531250.jpg)
-634888437341093750.jpg)
-634888438173750000.jpg)
-634888439034531250.jpg)
-634892832319306640.jpg)

-634892833816953125.jpg)
-634892834249091796.jpg)
-634892834434267578.jpg)
-634892834808886718.jpg)
-634892835278447266.jpg)
-634892835590283203.jpg)
-634942812445937500.jpg)
-634942812734375000.jpg)
-634942813123437500.jpg)
-634942813315625000.jpg)
-634942813599062500.jpg)
-634942814779687500.jpg)
-634942815003593750.jpg)
-634942815713906250.jpg)

-634943735723437500.jpg)
-634943736305937500.jpg)
-634943736485156250.jpg)
-634943737022343750.jpg)
-634943737185312500.jpg)
-634973207973593750.jpg)
-634973208133750000.jpg)
-634973208281406250.jpg)
-634973208663125000.jpg)
-634973208818281250.jpg)
-634973208953281250.jpg)
-634973209073125000.jpg)
-634973209337656250.jpg)
-634973209688906250.jpg)
-634973036686250000.jpg)
-634973036806562500.jpg)
-634973037173906250.jpg)
-634973037551562500.jpg)
-634973037657812500.jpg)
-634973037990000000.jpg)
-634973038105156250.jpg)
-634973038811406250.jpg)
-634973039078281250.jpg)
-634958526087812500.jpg)
-634958526257812500.jpg)
-634958526471093750.jpg)
-634958526682968750.jpg)
-634972882420156250.jpg)
-634972882651406250.jpg)
-634972882767343750.jpg)
-634972883194375000.jpg)
-634972883309062500.jpg)
I posted this in the wrong section I guess, but here is a link to my newest bot - RoboRAD. I am combining a RAD 2.0 base and a robosapien.

By bret.tallent
— Last update
Discover more robots

Jeremie's Treat-O-Matic 2020
Convert a claw-style candy machine into a contactless Halloween dispenser with Atomic Pi, Arduino EZB, camera, PIR,...

Kullthulu's J.A.R.V.I.S The Personal Assistant Bot.
J.A.R.V.I.S. humanoid build: custom AI core, Intel NUC, camera, servos, drivetrain options, and Synthiam ARC for home...

Sakis33's New Project Wall -E
Presenting my project and thanking Dj Sures for inspiring a new, engaging and rewarding hobby

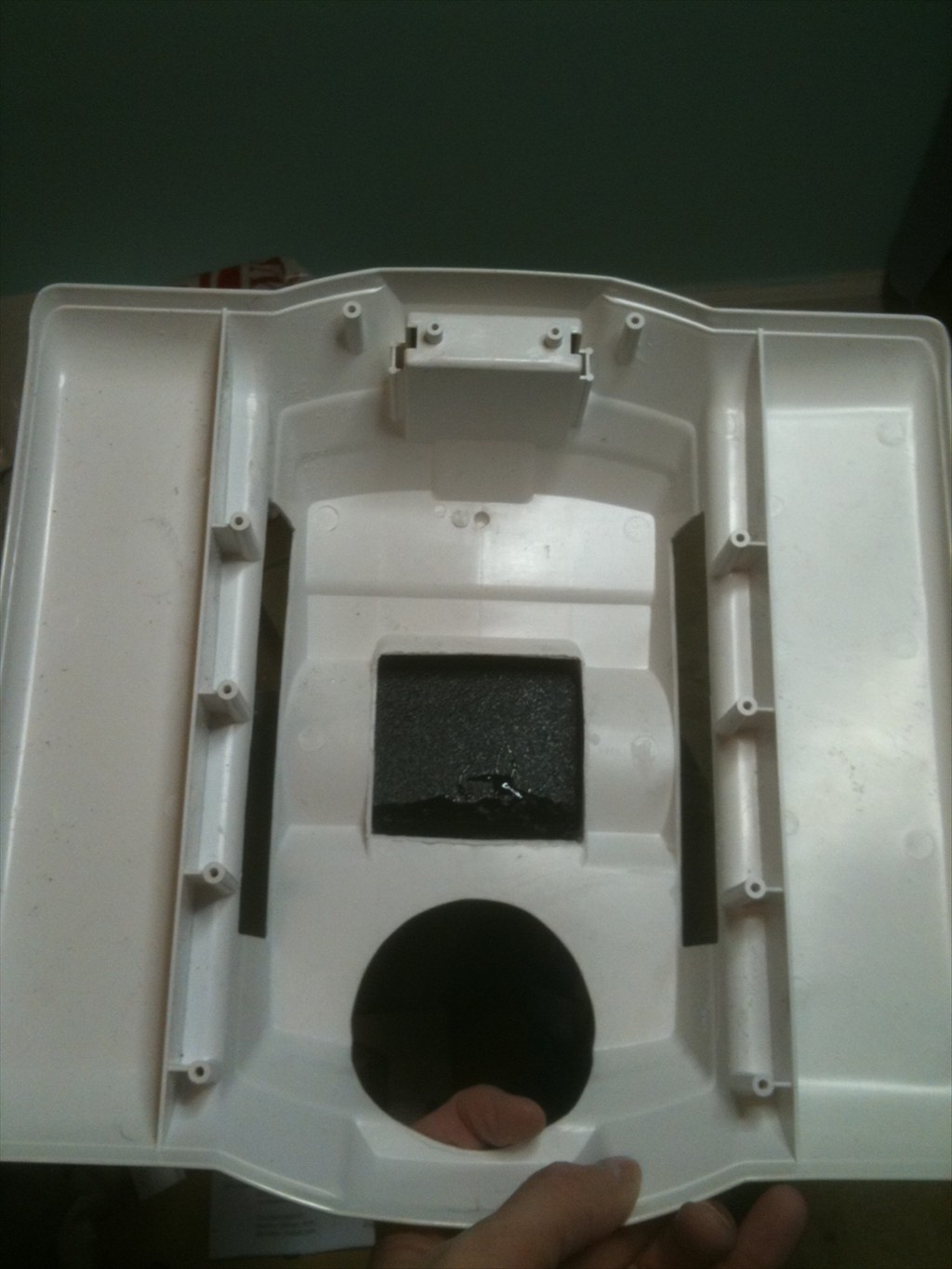
Well, first things first. I removed the cup holder.
-634892832319306640.jpg)
Then cleaned up the opening.While I had the old decals soaking in a cleaner, I decided to work on my camera mount. I am going to use the mounting plate from the original bracket.
-634892833816953125.jpg)
I used a servo horn from the servo I will be using to adapt to the mounting plate.-634892834434267578.jpg)
After cutting it down I was able to super glue it into the mounting plate.-634892834808886718.jpg)
Then attach that to the servo.-634892835278447266.jpg)
And finally attach that to the camera housing.-634892835590283203.jpg)
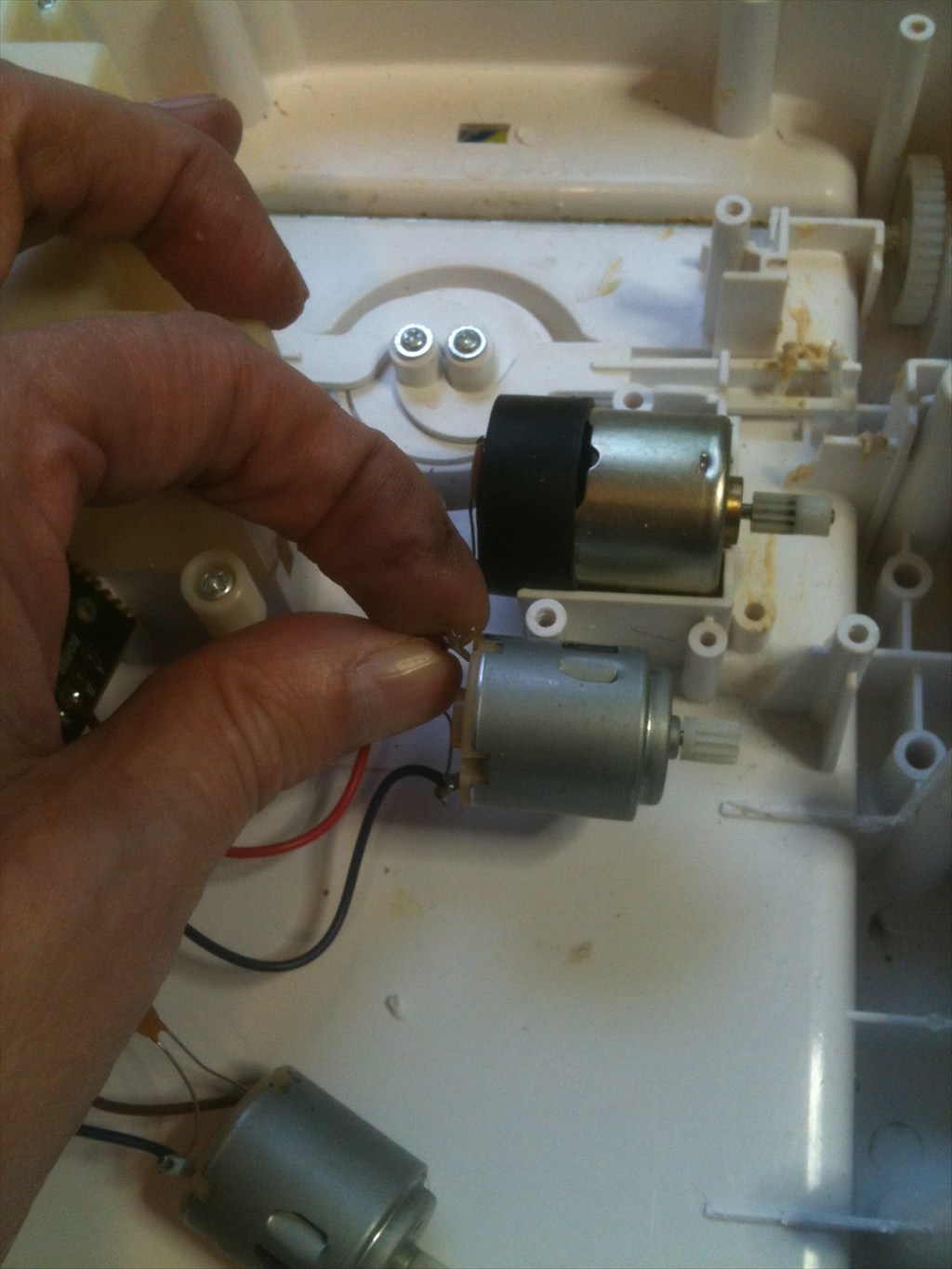
That will provide the pan to my camera. Next I will mount a servo to the side of this little servo for up and down movement. This whole thing will replace the head on Robosapien.I also started taking Robosapien apart for my modifications. I needed to remove the leg motors and the old head/neck. I am going to use the lights and sensor though to add to my new head/camera.
Nice i see you figured out what i did with squegees camera. Nice! Are you going to do a tilt up and down too?
Yup - did you do that on squeegee? If so, how did you do it? I was going to mount a servo horn on the side of the pan servo and attach it to another servo for up/down movement.
I have not done tilt on squeggee yet . I need to check for space. If /when i do it i will cut the slot the serve is in a quarter inch longer and cut the mounting tabs off. Then glue a serve horn to the side of the panning servo. Cheap mini pan and tilt sorta like gunner did. The "bracketless pan and tilt"
That's my plan as well. I think it will be fine.
I think my biggest hurdle is going to be how I drive the RAD section. You can only have one Movement Panel and that has to be the one connected to the Robosapien for communication to it's control board. So I am going to experiment with using the leg motor wires to drive the RAD motors.
Must you use the robosapien feature? Not sure how you would do that using power from leg motors. Is there a schematic you have for Robosapien to guide you?