

Hi Fellas.
I haven't been here for a while but have been keeping up from time to time anyways I wanted to introduce my new robot.
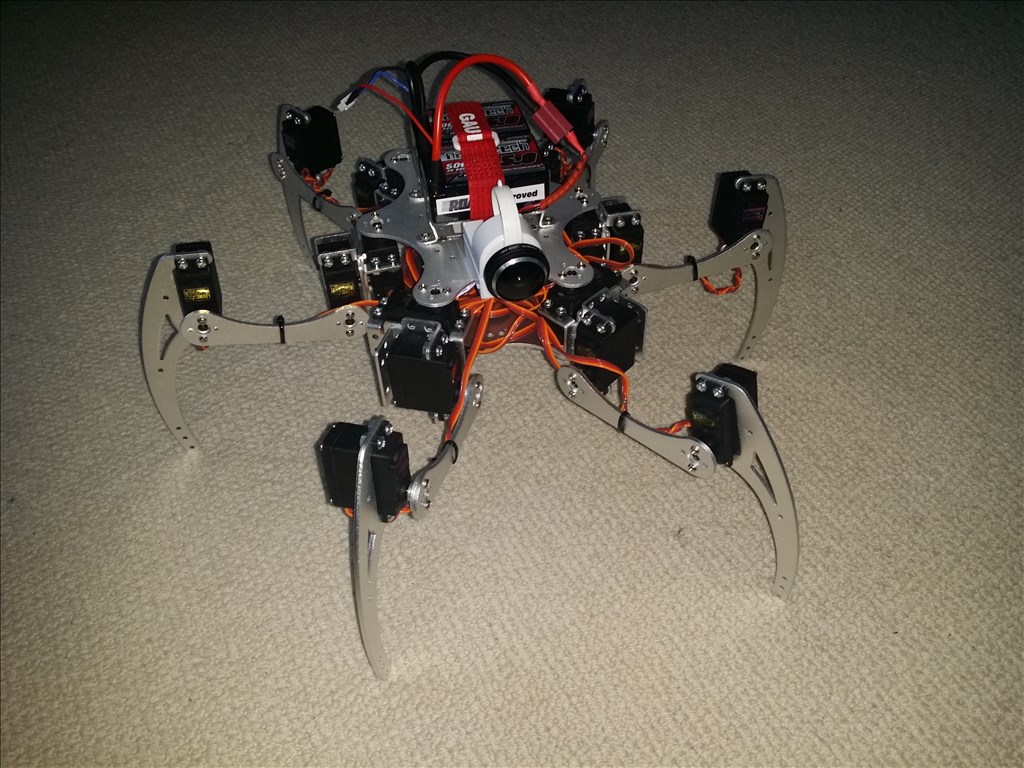
I wanted a nice Hex but I had issues with the Phoenix route so decided EZ-B was the way to go. So armed with a decent Chinese Aluminium Hex body I set to getting this thing built.
Today it took its first steps. I don't have a name yet but im sure it will come I put up some videos soon. ive just got to get it all connected again.
Im loving how easy it is to create programs with the ARC I had it walking in 2 hours
so here it is:

Im planning some sensors and maybe an attack Mode with fangs on another servo to chase the cats out of my garden.
thanks for reading. I hope the pictures are there this is my first upload...
Andre.
Other robots from Synthiam community

Jstarne1's Nano Smart Aquarium

Oldbotbuilder's My Talking Robot, Lester

very cool build robot.
the most smart spider off today calt portas,maybe a name ?
Oh I like this guy! Can't wait to see a video - he's gonna be great
like it. is that an add on lens for the camera if so where is it from
You are correct. It's a 10 deg fishery from that popular bidding site. I have yet to play with it but it looks pretty good so far
Andre.
Andre,
Nice Hexapod, very similar to mine, but mine is in black anodised Aluminum, see video below. I did find that with a heavy duty battery pack, EZB controller, and having 20x MG996R servo's ( 18 for legs and 2 for the senors ) did make it very heavy.
I'm running 2x 7.4v 5000 mah making 10000 mah. it lasts about an hour I haven't really timed it. It is quite heavy but it seems to be ok. And the last post should say a 180 deg lens
Andre
@cem that's real smooth! Blows away the Intel Hexapods.
@cem , What hexapod frame did you use? It resembles a Phoenix, but appears to be slightly different.
@BrandonEckert
It was from Micro Magic Systems here in the UK, called the MSR-H01 Hexapod.
They don't sell them anymore, but it is based off the Phoenix, I believe?
The Company is owned by Matt Denton, who built the Huge Giant Hexapod back in 2012, it weighed 1,900kg, stands 2.8m high and has 2.2 litre turbo diesel engine.
http://www.dailymail.co.uk/sciencetech/article-2310411/Beware-Mantis-Giant-legged-terrain-robotic-creature-revealed.html
I used a frame from China It looks similar to the phoenix. I bought on the Internet for about £60.00 delivered with bearings and screws all the servos I had previously they are mg996r and mg996r . I have an ez-b v 4 a sharp ir sensor an I've ordered some i2c rgb led for eyes The only issue I have is that 2 servos get hot and I have to let them cool.
I already fried 2 and had to rewire them.
Andre
OK here it is my first youtube upload and my first ezrobot video upload
Attack Action
thanks DJ for help with the script
andre
Here is another video the fangs need tweaking but you can see the principle
Enjoy
Andre
Perhaps im a rookie here, but how did this post get hijacked with someone else's picture on the header
Not cool man make your own posts
Andre confused mad
@drephreak, I agree, your project showcase has been hijacked. I too and others have been a victim of this. Sometimes other forum members don't realize what they are doing and some do. Either way, I think a Project Showcase should highlight that project and not someone else's videos, pictures and concepts of their project that may be related. They should read the Forum Etiquette section here, https://synthiam.com/Community/Questions/321 and start a Project Showcase of their project. Hopefully, he'll remove his posts and video and start his own thread highlighting his robot.
Your robot looks great!
drephreak
you can ask the person to remove his video,but you need to call him by name. els he will not now its about him.am sure he didn know the video will be chown, in your header.he was just excited to see same robot.
@nomad18.08 .... he'll know he's the only one with the "other" video in this thread.... @Bob and @drephreak are correct we (and I have been guilty too) have to stop hijacking other people's threads....
thru but iff you see post #8 this person chould also respond.
Hold on a minute!
I didn't hijacking this thread, in fact I was replying back to @drephreak, with the video of my Hexapod, who had respond back to my thread a while ago!
I'll gladly remove my video, and not sure how it ended up as the photo on this header?
Chris.
Chris, don't worry about it at all. Sometimes people get kinda anal and crass around here. However they mean well but you may know the old saying; "The pathway to hell is paved with good intentions".
Anyway, it's great that you took part in the discussion and shared your cool little spider. I thought it was right "on topic" and very appropriate. Heck, there are literally thousands of posts with people showing off what they built that is similar to the these threads OP's robot. I don't know why they chose you to drop the hammer on. Just ignore them and feel free to share your on topic ideas and achievements. Shearing is what this forum is all about. It always helps and is very enjoyable to have someone who is working on something like you and to show off their work and ideas behind it. This is how we learn from each other. I hope you repost your video. I found it to be very informative and cool.
I also hope members stop trying to stifle interaction and speech here. We've lost a few very talented people that were just trying to share their ideas because someone jumped in their shit. They were told they were wrong to present their methods and they would "get over that way of thinking" once they were graced with the presents of an EZB.
As far as your pic getting placed on the topic header it was a function of the computer monitoring this forum. It was ignorant and abusive to imply you had anything to do with it. Common since and social grace is not a requirement for membership here. However not inciting a witch hunt is. mad
Deleted post
No, Nomad, you actually sounded like a voice of reasion. You mentioned that Chris probably no ill intent. It actually was hardware that put Chris's picutre on the top. We as forum members and responders to a thread have no control over what goes there.
For the record, ignorance is not a bad word. I just means that the person does not know.
I really like the videos of this robot! Keep them coming It will be a nice robot to feature in one of our upcoming videos. Thanks for sharing!
It will be a nice robot to feature in one of our upcoming videos. Thanks for sharing!
Deleted post
I know this is an old posting however I am wanting to build a hex as well and in looking at yours and reading this I have to wonder if you ran into the same issue I did. I began trying to build a phoenix type hexapod bit used the same framework you did with the same mg996r servos and ran into complications with a cheap lobot controller and servos that kept "going out", burning out, or generally broke. So I am wondering if going with the EXROBOT microcontroller and software would resolve all of these issue I keep running into. It appears that this controller can not only run the mg996r servos but even dynamixel! and can handle more than enough servos for a 3 or possibly 4 DOF per leg hex design? Is it really as simple as connecting my servos to the microcontroller, calibrating or "centering" the servos, and control or program from the software? no debugging, compiling, just connect and control? also can six be built with 3dof per leg? if I am correct please tell me as I will dive right in if I am wrong please correct me. sorry so long but anxious to find out. thank you for your time and hopefully a reply on this years old thread. -Legren-
Legren, I’m currently rebuilding my hexapod using the HDD Servos and EZB controller, as I complete disassembled it to using the Servos and EZB when I started my InMoov build. One of the major issues I had was because the framework was ALL metal and with the 20 Servos and 2 batteries the hexapod was extremely heavy and the Servos would buzz like mad in certain hold positions ( normal characteristics of MG996R and most other servos ).
With the HDD Servos there’s no buzzing at all, and are fantastic servos.
I’ll post pics and video once completed.
Chris.
Legren, your questions are correct. Simply connect up to 24 servos directly to the ezb and programming is fun, not compiling and stuff. Add camera and speech and joysticks. Even make a mobile app for your robot without having to compile etc.
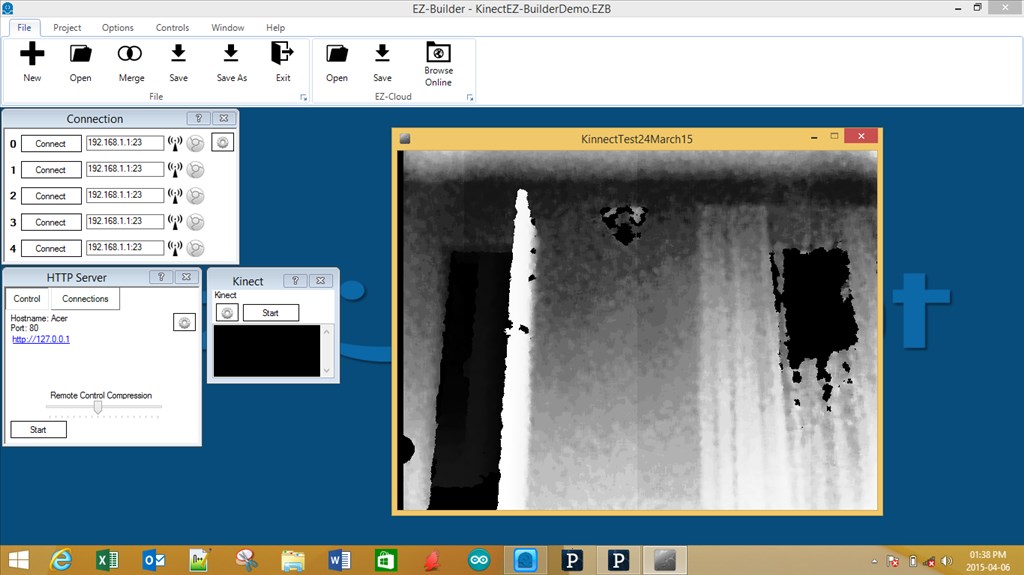
Thank you both for the replies. My SIX is on it's way to me (I expect it to arrive day after tomorrow!) and based on your replies I'm excited and expect I'll be ordering an additional EZB as well. I have lots of extra stuff laying around I could put to use if the ezb is as I now expect! Again thank you both! Oh and does six require a ultra sonic distance sensor for true object tracking or is it only to improve tracking?
Distance sensor is for detecting distance - nothing to do with objects. For object tracking, the camera is used. You can find out more using the robot program. There's plenty of great activities at the robot program in the learn section.
Is there a program or script for a hexapod with 3dof for 18 servos controlling the legs? Or even for SIX with an extra servo per leg?
Not that I know of, but using the Auto-position control will make it easy to create your own brand new walking gait with 3dof per leg