


























It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots

Ezang's Following, Tracking The Blue Line With ARC
Synthiam ARC camera movement tracking for easy object tracking; troubleshooting tip: tail orientation can cause...
Thetechguru's Long Lasting Roli
Extend Roli's runtime for NMS experiments with a 7200mAh internal battery installed after a precise Dremel mod, boosting...

Ezang's New Creation - Mr. Roman 2 Video
Mr. Roman with scarf and hat and a little blue Arduino-based friend

@Glickclik Are you planning on using the right arms internal gears or will you be adding servos? I am lookign for arm's gears to fix up my Omnibot 2000 - but since I am using it with the old Tomy circuit board still I can not add servos but have to stick with the old mechanics. Pls let me know! Mike
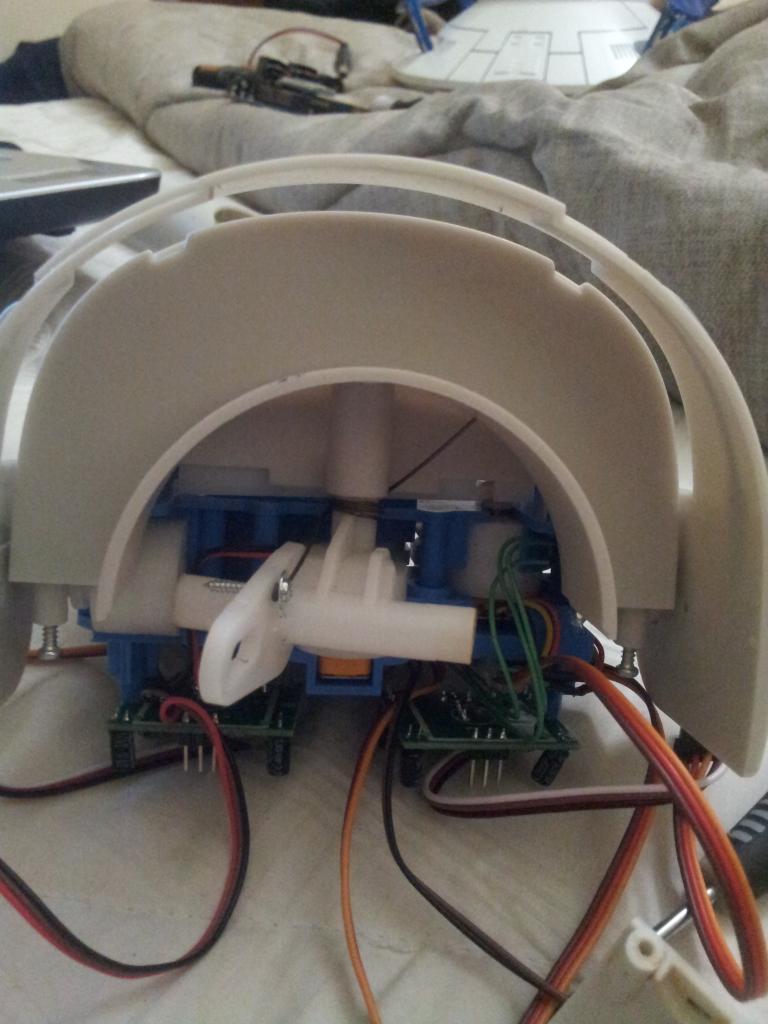
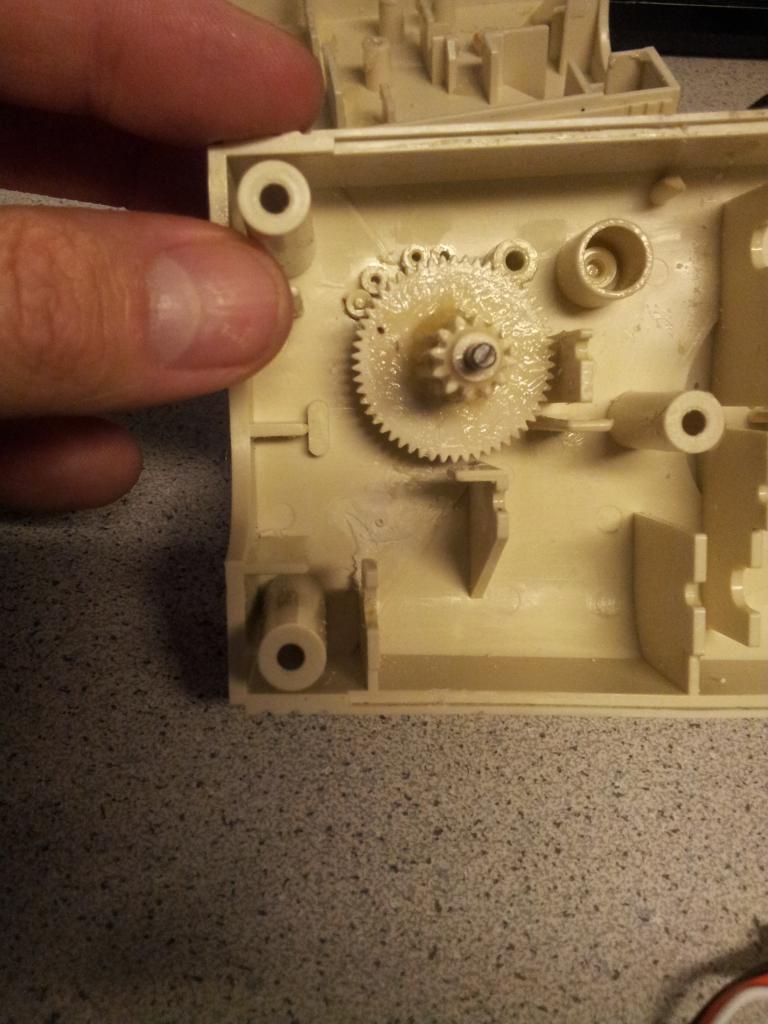
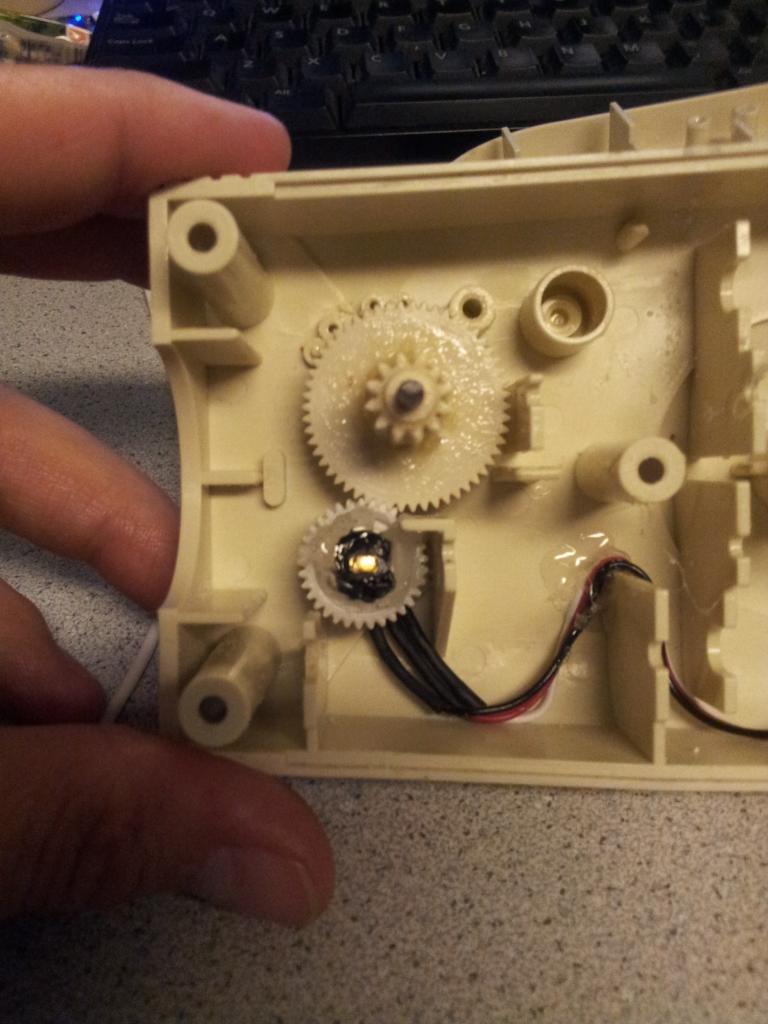
Which gears? It might not be the gears at all. My right arm wasnt working but when I opened it up I saw the broken parts. The tall tube was broke and where it mated to the lower arm had broke too. Lucky I swapped with the other arm's parts. Have you looked inside them?
Yeah, I have another right arm that is missing quite a few gears. Now I am trying to get the gears together. Its hard to find a signle right arm these days so I figured I might just ask and see whether you or jstarne are using servos and getting rid of the old gears. P.S. Couldnt be the left arms gears, since there is no motor-controlled hand or arm movement.
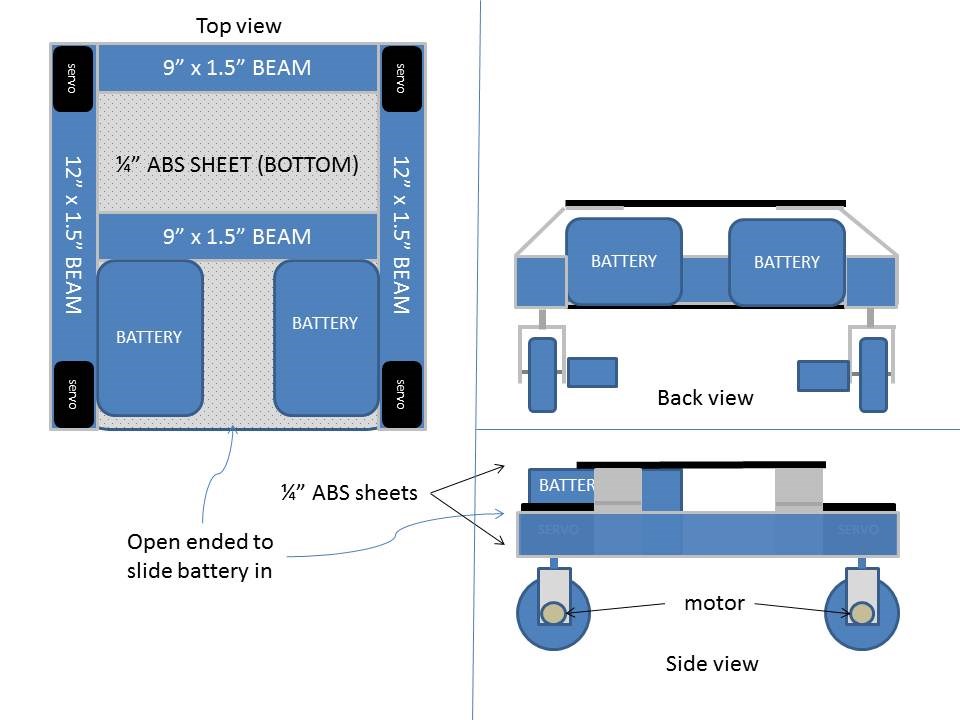
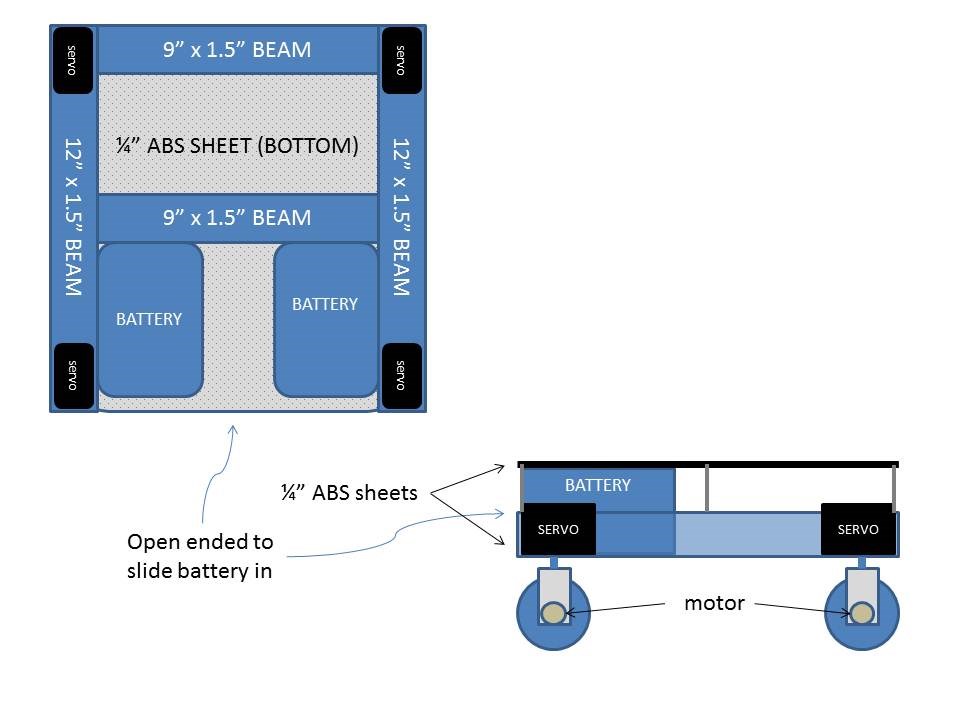
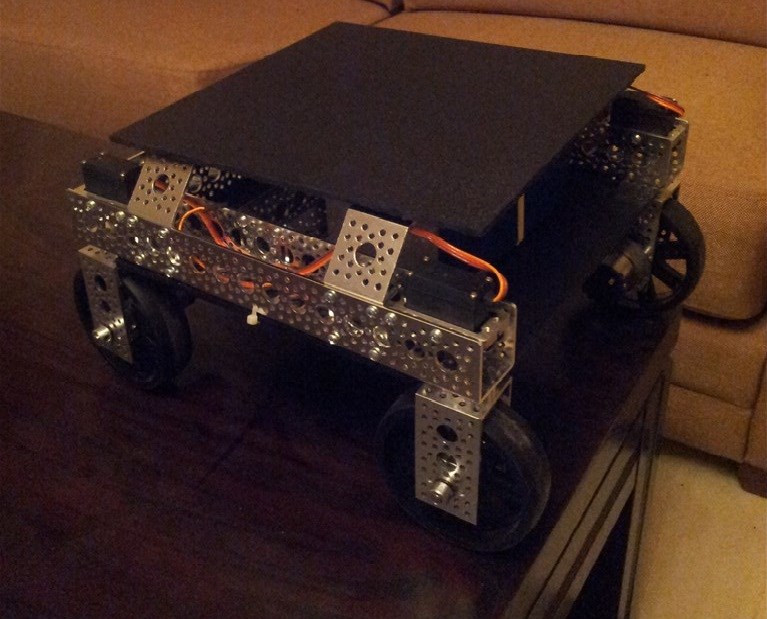
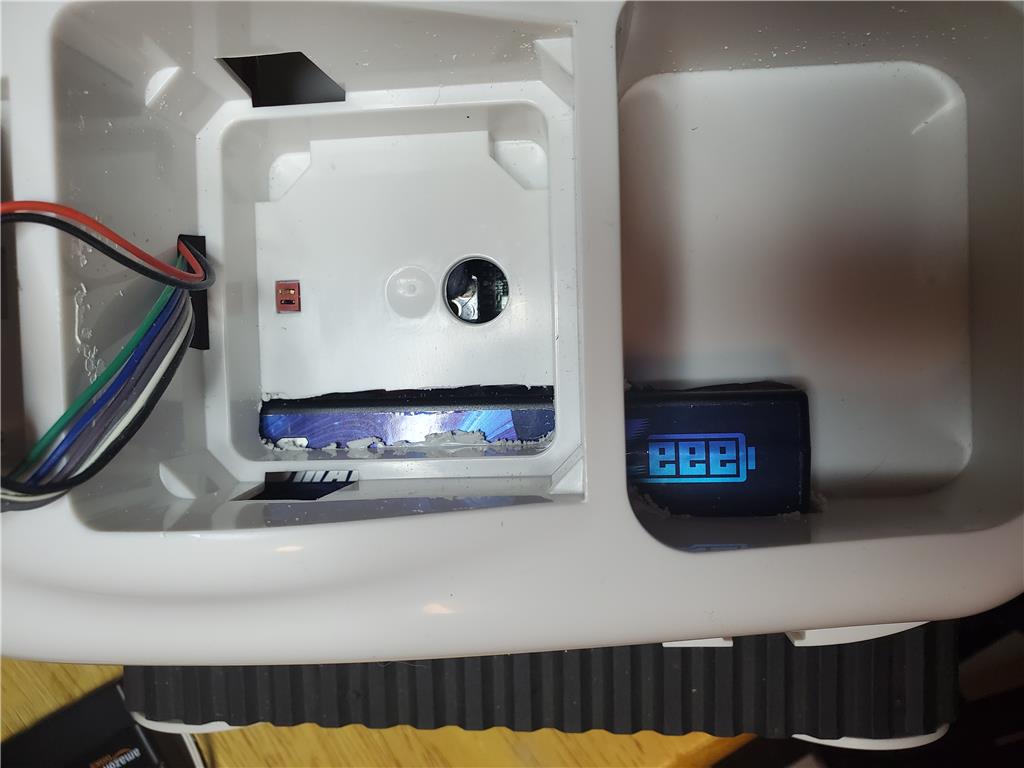
Here is my current setup and for having a onboard itx ti works well. , in the bottom drawer you can lay over a 7.5 ah battery on its side and still have plenty of airspace for your motherboard. There's a couple pics of that...
This lowers center of gravity a bit. Be sure to either glue in a thick sheet of plastic or a 1/4" ply to support constant weight of batteries , without it the plastic flexes/warps overtime so for sure don't forget thatt detail for pinhead.
@MikeDC But the left arm has a few gears in there. Not all but maybe the ones you need. @jstarne1 Thanks man!
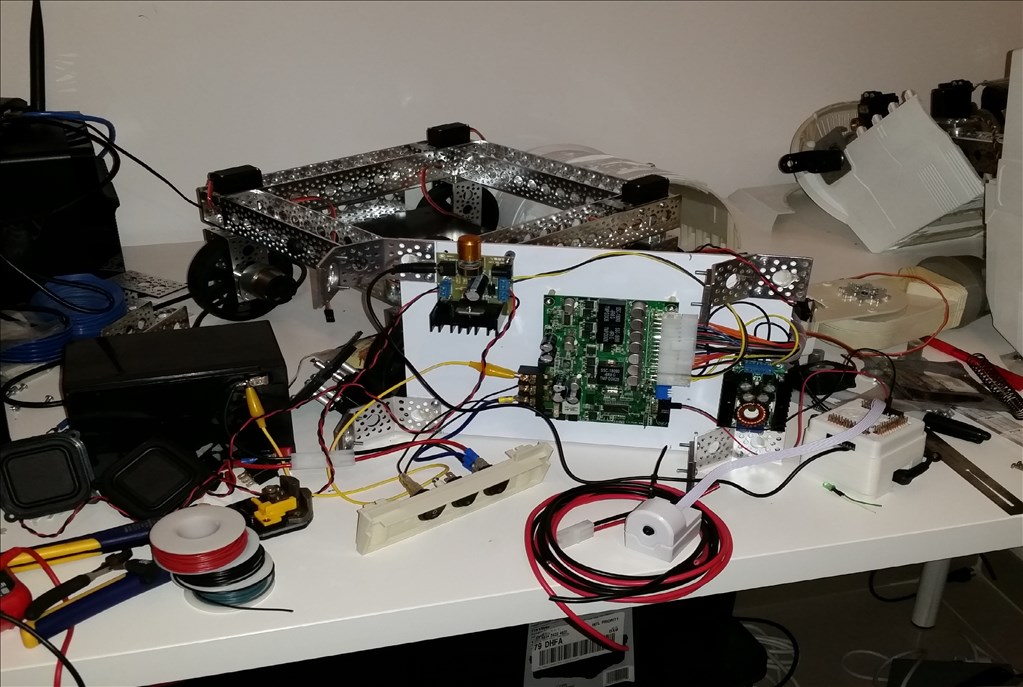
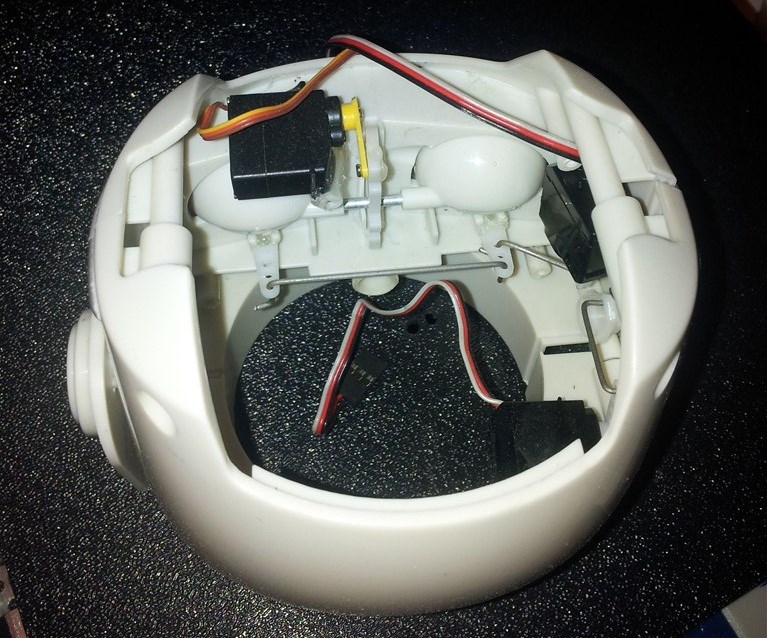
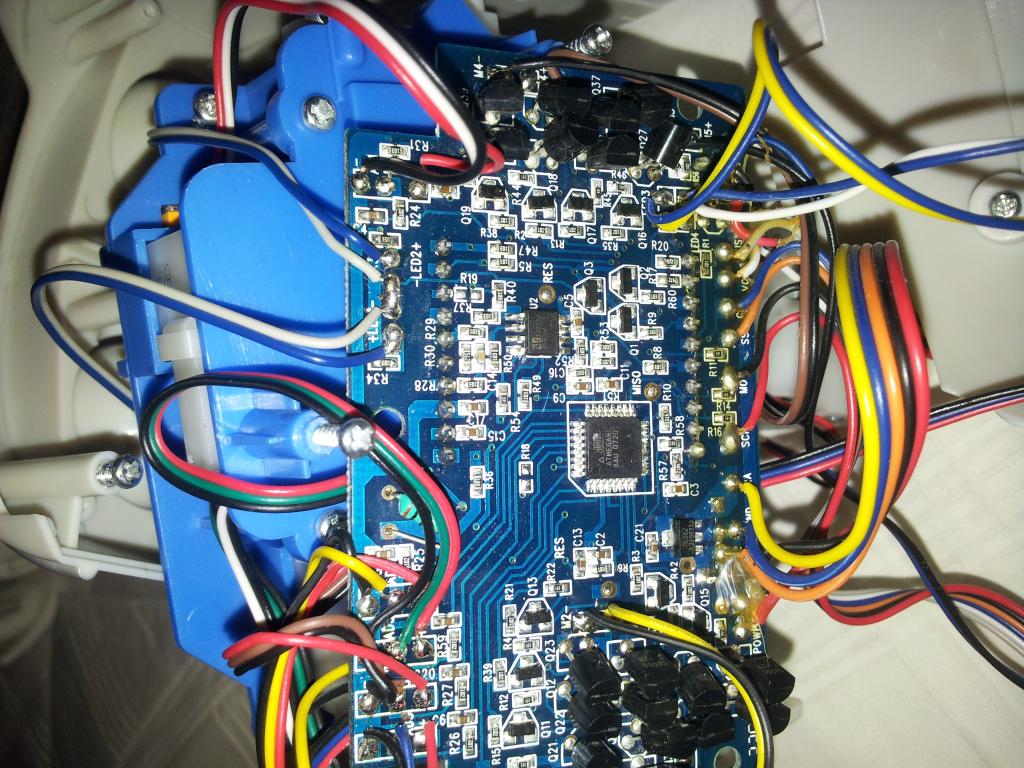
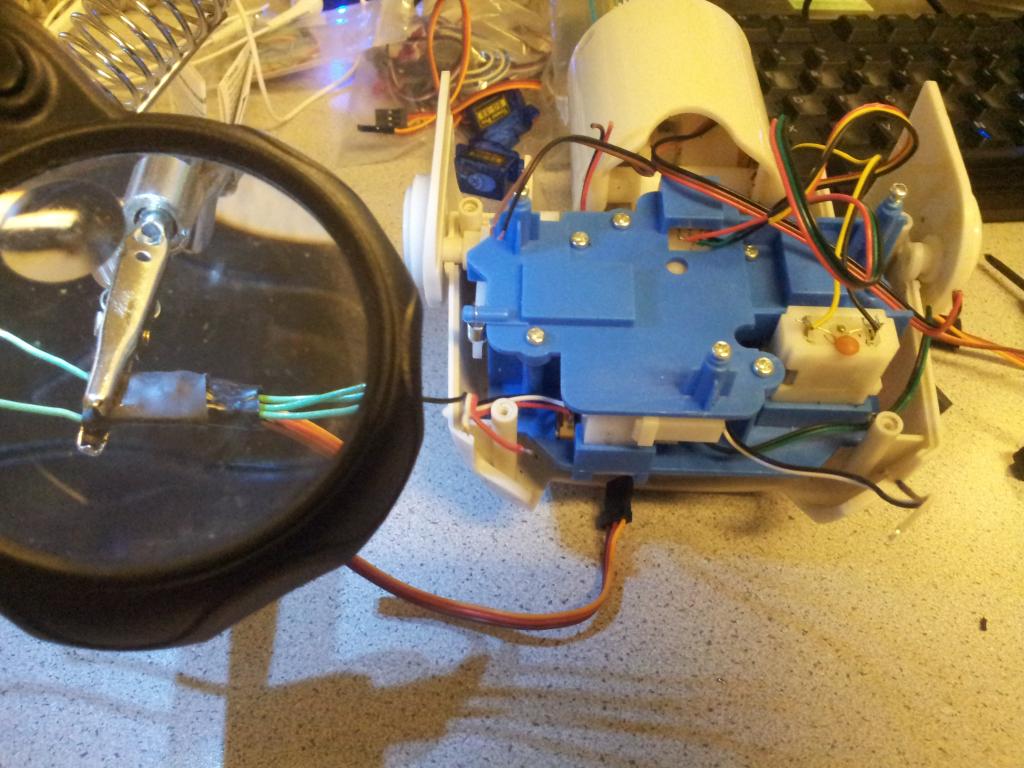
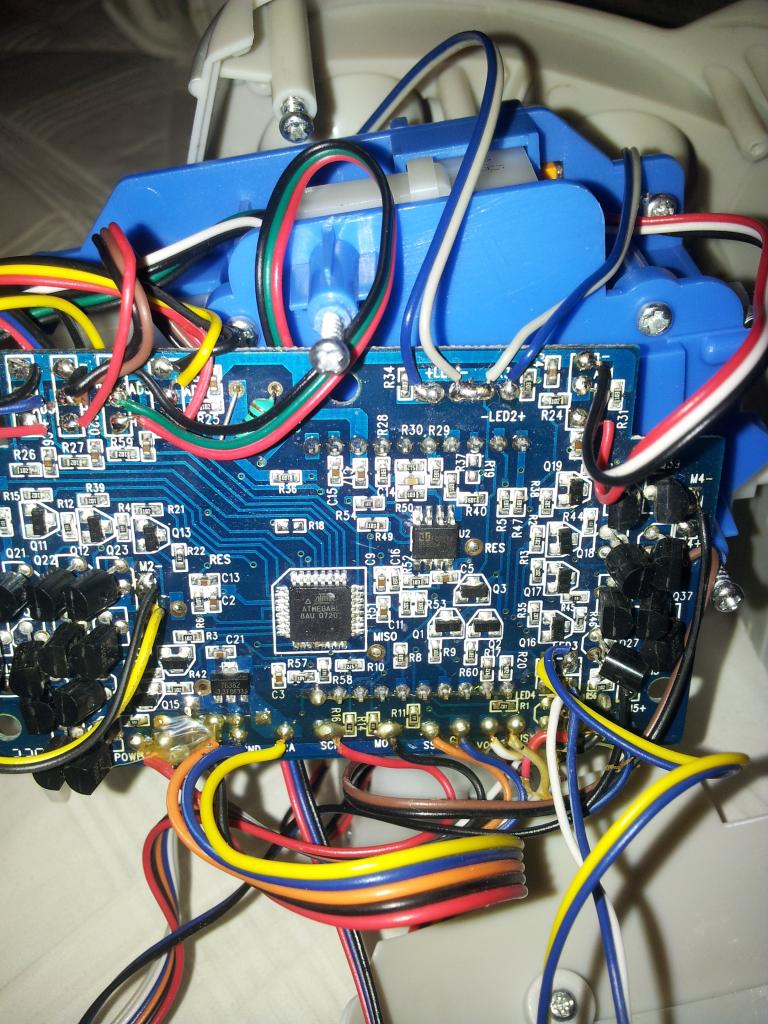
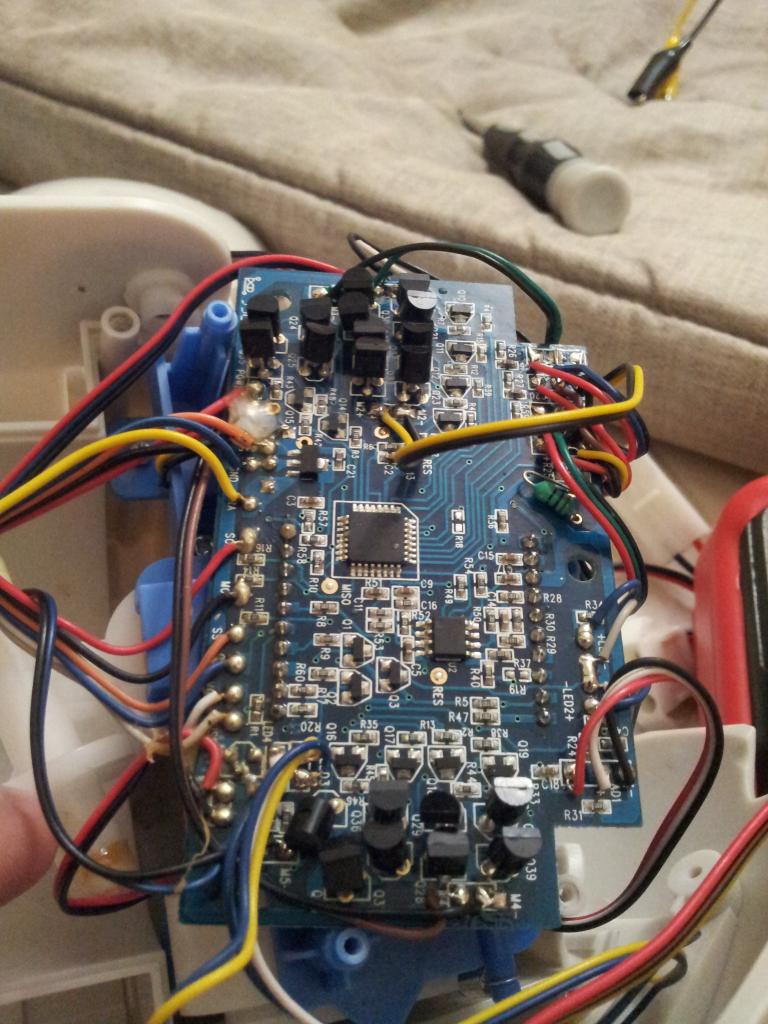
....looking for anyones help figuring this out... The wires at top left are for the potentiometers (position for feedback) and the chip in the center I assume is for choreographed movements. The wires on the bottom came from the base and probably went to speakers, buttons, power, etc. Transistors are for h-bridges because all the motors are DC.
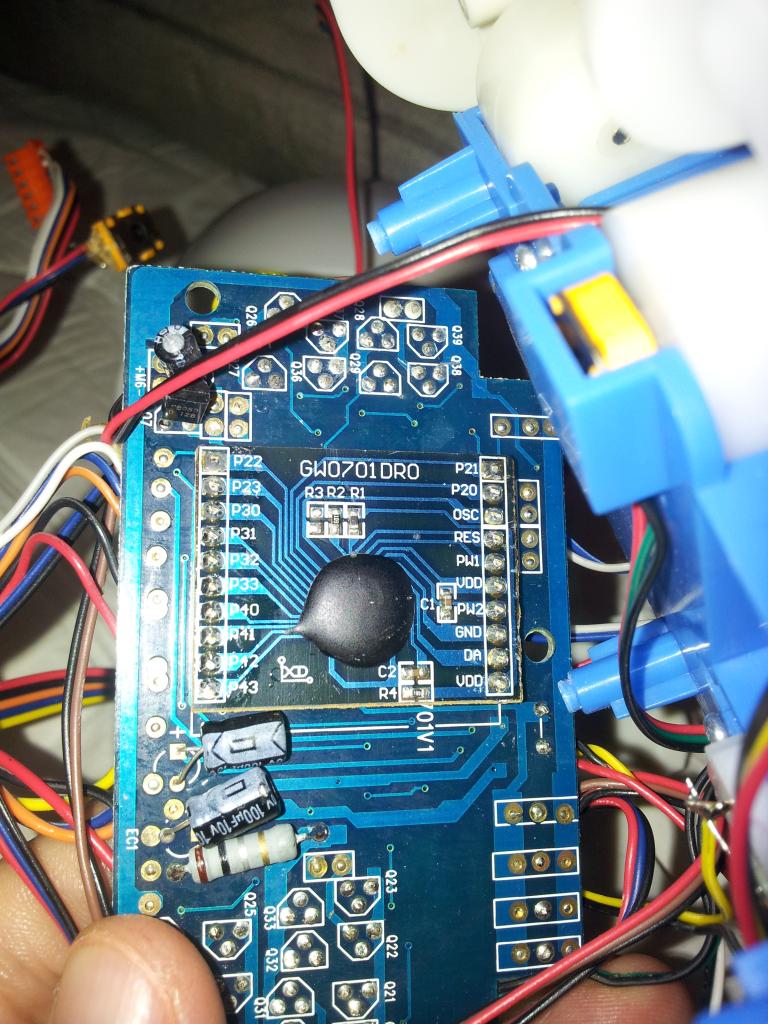
The chip in the epoxy I assume is the prerecorded voice.
Nice project you got going! Needs more input!!! I just finished watching Short Circuit the other day can't get that phrase out of my head...haha. I just got my Omnibot 2000, poor thing arrived with a broken arm, but i don't mind got him for only $70 shipped knowing how much these goes for these day and im going to hack him up anyway. My next project? I have two many bots now to decide which will be the next project eyeroll
and im going to hack him up anyway. My next project? I have two many bots now to decide which will be the next project eyeroll
For the head, you can add two large tubes of some sort, needs to be light weight and add speakers in there with grill covers, may be too heavy for his head to support? or buy a large headphone (over the ear type) and put it over his head. Just throwing out ideas.
That's a really complicated head sir!