




I don't know if this will work, but here is a youtube link. This was my first attempt at uploading a video there. The file was done on an Galaxy Tablet, at 122 MB, I figured DJ would prefer it not take up space on his server.
Dogbot has a bit of User operator error, but with a little more training It'll be run much soother. Next phase is to pickup a few more Servos to add a better head, and a left arm. At somepoint the wife (our resident knitter) will make a red sweater for the dog, so DogBot can track her. Given the reliablity issues involved with color tracking though, I'm leaning more toward RFID tracking.
By Dave L
— Last update
Discover more robots

Vertigo's Getting Started On My Inmoov Head
Control an InMoov head with EZ-B and Synthiam ARC: scripted person tracking, pause-and-compensate servo control,...

Tameion's Lawrence The Butler
Build Lawrence VIKI/Jarvis-style assistant using EZ-Robot, DJ Sures tutorials and student projects to automate a...

Kkeast's Its Gonna Be RAD
Mod RAD 2.0 with EZ-B: add H-bridges, servos, accelerometer, distance sensor, camera and MP3 for tracked, waist-bending,...

Sounds like he has a lot of power. Great job!!
Dave, press CONFIG in the Sabertooth Movement Panel and change the values to the speed you desire
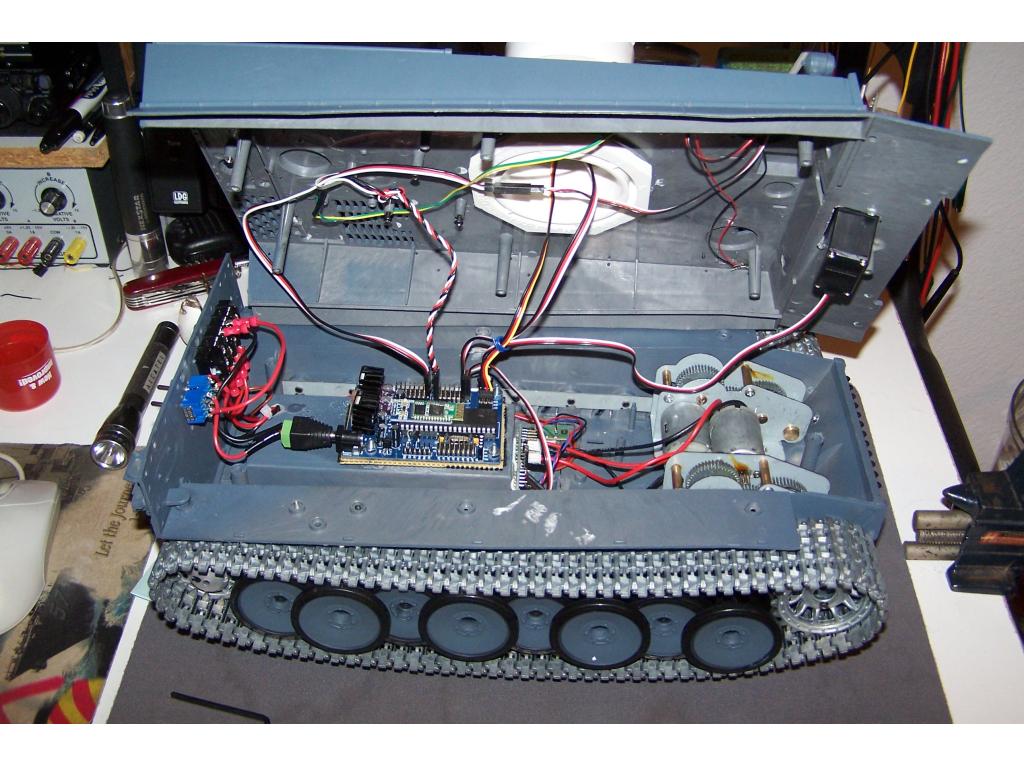
Nice work Dave - I wish I had treads like yours - did you build them yourself or get them fom a kit ?
@Hazbot
they look like a tiger tank kit chassis .I used to have one a few years back.
DJ, I got that part worked out changing the values. I was hoping there was a way to change the speed on the fly.
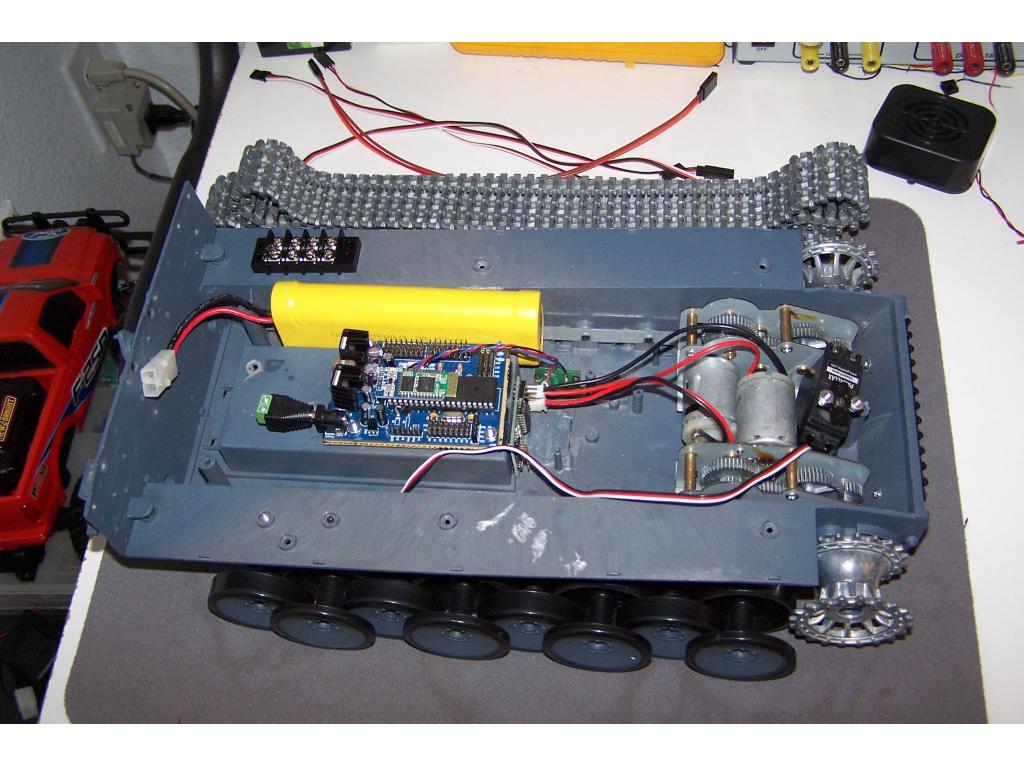
Steve is correct the base and tracks are from a Recycled R/C Tiger tank.
Oops clicked on the wrong Pic.