
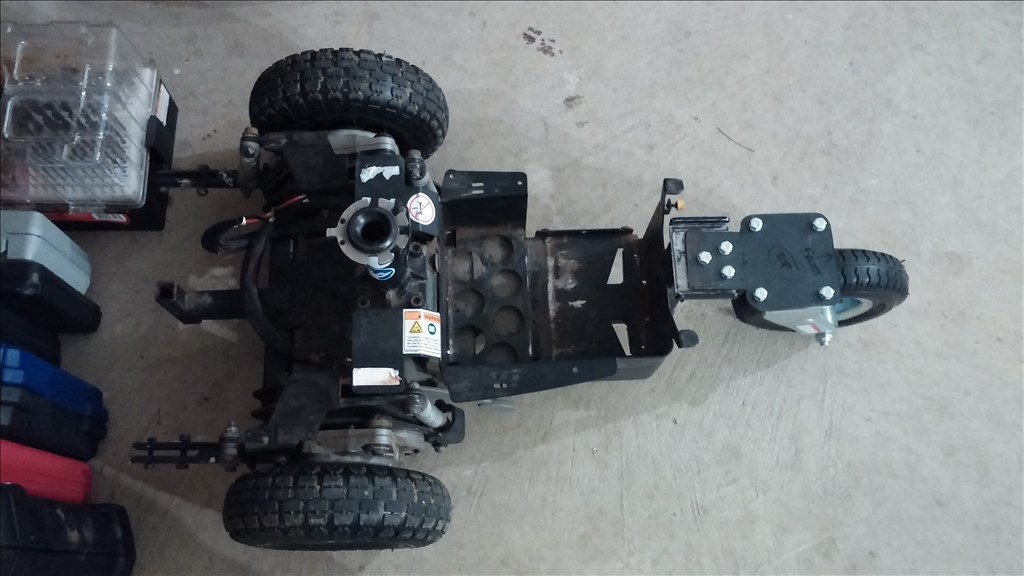
So it's time to dig out of this winter mess down hear in Obamaland. I put the Quad Scout up until I try out a delta configuration.
Not sure if I like this but I am committed to at least trying it. The purpose is to see if the delta or the quad configuration is best suited for unimproved terrain.
GPS guidance is done and working well. Once I get the base determined I need to start on a weather proof electronics bay.
Anyone else on here have experience with quad or delta on unimproved terrain. These bases will weigh in at 100 lbs each without the mod packs. total weight estimates max at 240 lbs.
These are not meant to run around your living room. They live in the wild.



By pacowang
— Last update
Discover more robots

Putt's Shorty
Custom EZ-B bot built on a Parallax BOE base with a LynxMotion torso and brackets; work-in-progress assembly

Richiesrc's Phoebe & Rich's Wall-E Progress Pics
Wall-E build progress: new tracks planned, underside-mounted motors/servos, electronics and panels fitted; arms, neck...
DJ's Self Docking Robot
Synthiam ARC enables phone control and simple self-docking for Ohmnilabs telepresence robots using a Logitech camera...

@ Antron007, Thank you. A lot of Red-Neck engineering to go.
@ Doombot, Agreed on the 3rd wheel being less stable. On the quad the turning does produce drag with 2WD. I plan to take the semi 4wd (chain linked to motors) and give 4 motors a go knowing it will shorten the battery life. All these trade offs. Hope to get the gas powered riding mower base operational by mid summer.
I may take you up on the base option you give. Actually I know I will.
@ Anthony, is that the cover for the wheel chair base that came on the scooter? If not how did you make that? From the picture it looks like injection molded plastic but seeing your 3D printing work I'm thinking you could have pulled that off somehow. I am highly impressed with your work.