




This is a WIP of a cycloidal gearbox with a reduction ratio of 40:1. It is driven by a Tarot 4108 brushless motor, in theory it should have almost zero backlash...

By Mickey666Maus
— Last update
Discover more robots

DJ's Irobot Roomba Hack
Convert an iRobot Roomba with EZ-B to a wireless, voice- and vision-enabled cleaner-camera color/motion tracking, remote...

Ezang's My New Robot - Spider Bot
New robot showcased again, enjoy and laugh at my latest robot.
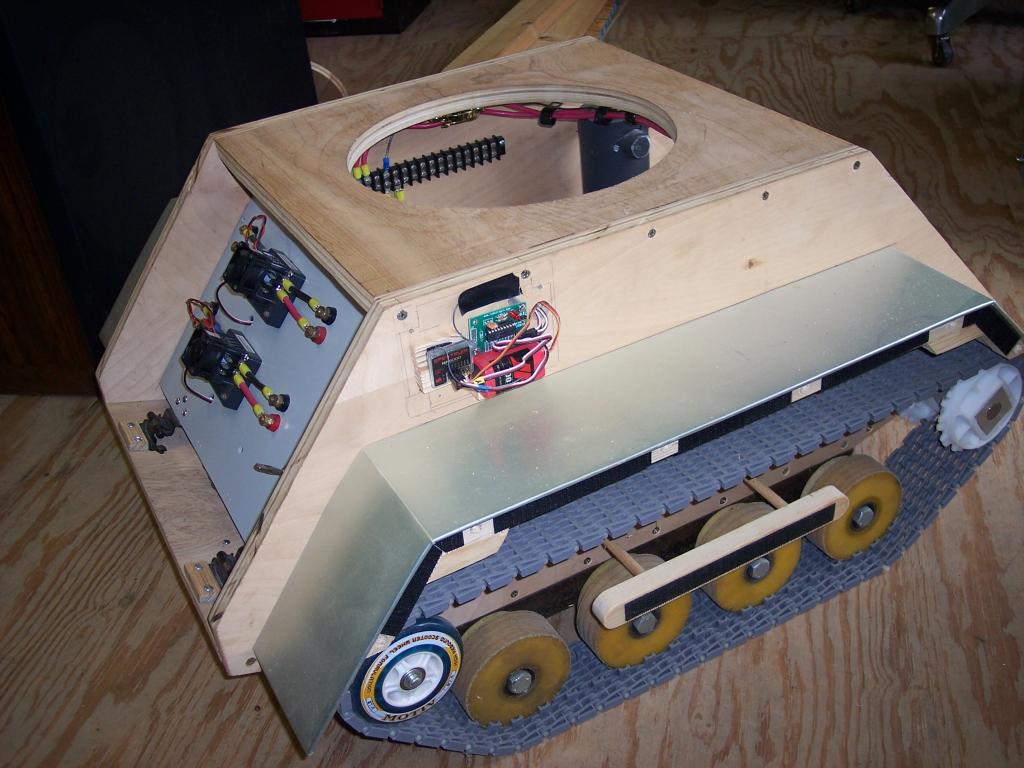
Rgordon's Magnus The 6 Ft Robot
Magnus: a 6 ft, 300 lb humanoid using wheelchair motors to drive tank treads; builder exploring E Z Robot kit and...

Good find!! I will take a look!!
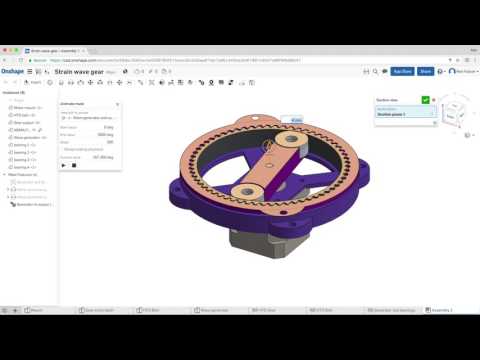
This is another take on a strain wave gear, it works with a belt! I am not sure if this is the better choice over a printed one...but it would surely offer all the needed material properties needed for that part!
This is a nice take a a 3d printed strain wave gear, but seeing the noise and vibration makes me afraid that it might be better to stay within the cycloidal realm of gearboxes?
What do you guys think?
So I got the gearbox setup with the encoder working...it is actually less vibration than expected, I will make more stress tests under load!
Looking good so far!!
Also ARC integration is super easy!!
Nice job! What did you print your parts with?
Its all ABS...
What was the approximate cost for the parts?
Looking forward to your torque testing.
I used an Odrive and the recommended controller from their site...
The motors and bearings were ordered from China, do quiet cheap but as we all know...its a waiting game!!
I think the cost should be less than 150 per joint!!
But a 3d printed gearbox still is a 3d printed gearbox after all...lets see how it'll hold up during some stress tests!!