



Hi all
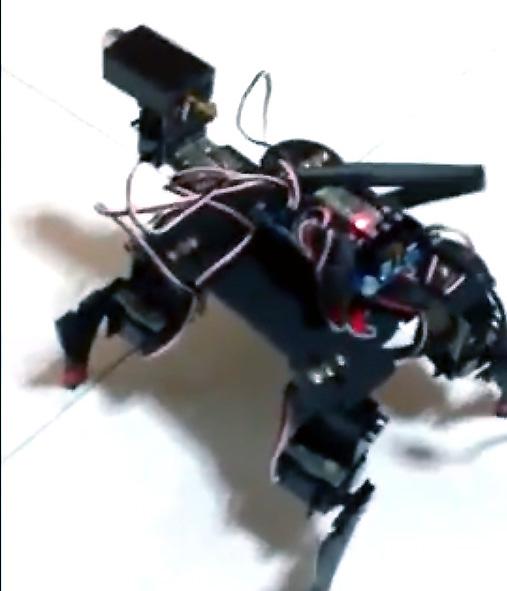
I have a made a new 2 DOF quad.
He is called Crabio 1.
I only have time to add a video about him for the time being.
I will post more pictures soon.
His walking pattern is abit noobish but i will fine tune him later:)
enjoy for the time being:)
By iskandershah
— Last update
Discover more robots

Mickey666maus's UNITY LINK / ARC
Link Unity 3D to Synthiam ARC using Flask and Python to send virtual servo positions to real servos, sync motion via COM...

Jason's Roli Time-Lapse Video Robot
Roli time-lapse rig with printable GoPro EZ-Bit and simple code to nudge the chassis, plus a $25 film rail for smooth...

Csa459's Ok Guys Wet And Dry Vac For Robot Start With
Repurpose an old wet/dry vac shell with an EZ-B kit-ideal starter for a planned build after Christmas, prepping parts...

Looks Great!
That is awwesome!
Just love seeing different things to wheels for moving robots around. Those legs may not be very efficient and appear a bit creepy but they give the robot real character - great job
yes you are right, the legs are too heavy for a small robot like carbio, so i did my research and shortened his leg. Now he can reverse, turn and walk.
While uploading the video for Carbio, I just tweaked the code a little and carbio can now stride faster then his normal speed.
Soon he will be chasing red balls:)
Btw Carbio wishes to say hi to All EZ Bians!
This is truly one awesome bot!
Thanks Bret.Tallent
Iskandershah - The way your robot Crabio has 2 verticle positions is very cool, great progress on how he moves around on those freaky legs - Love the camera position - Great stuff and fun to watch