
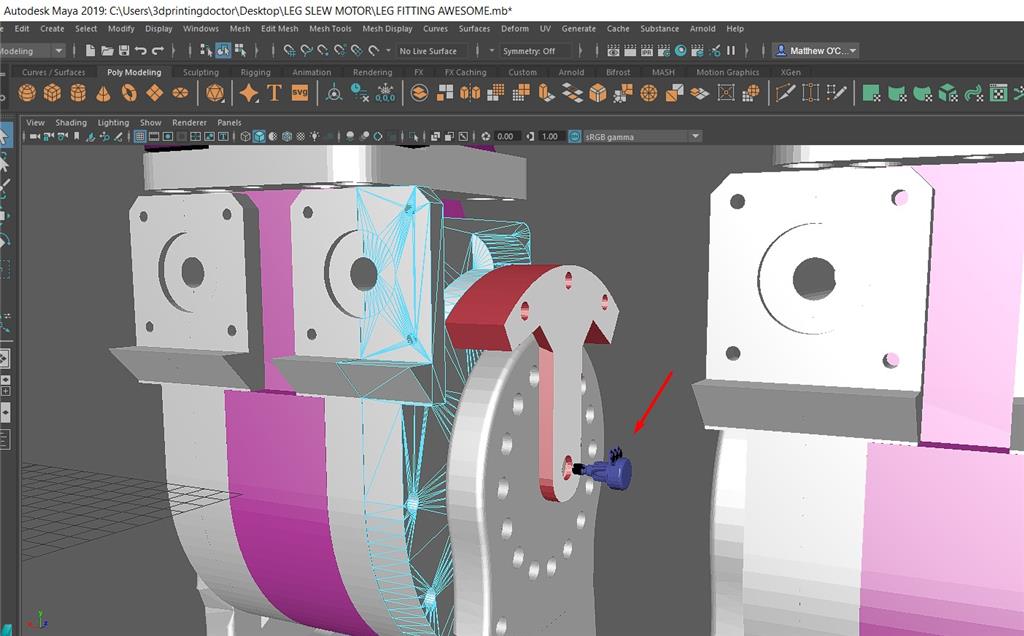
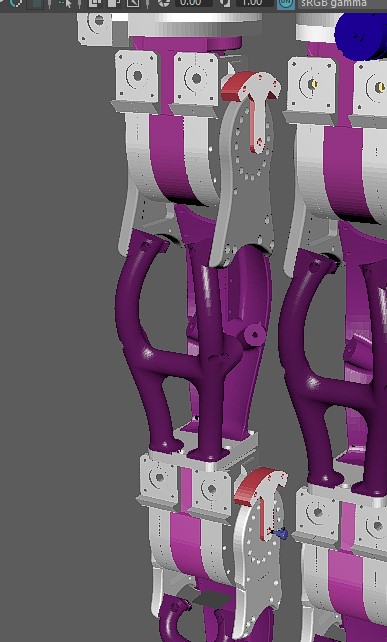
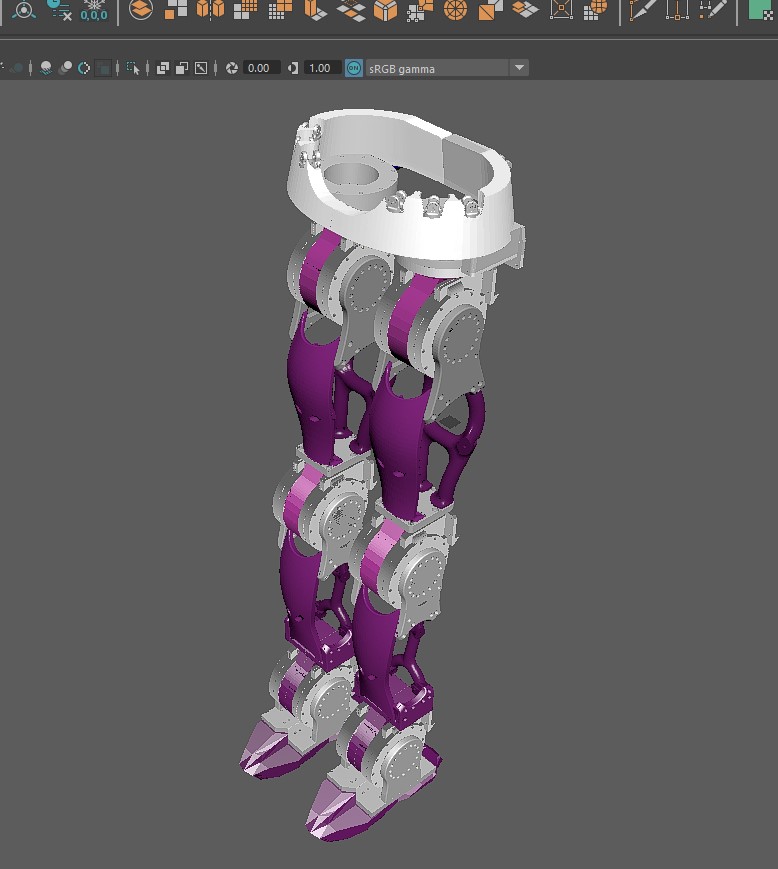
Hello Again pheww the robot legs are done and ready to 3d print each joint uses a parametric slew motor which are driven by 550 type dc motors or nema 17 stepper motors (your choice) because I just made an adapter so you can use either and they are to be used with l298n h bridjes and an ezb or converted arduinos. These are the size of a human. I am waiting to 3d print them as my printer is broke. the part is coming any day now. These legs use 12 gears and 12 dc motors but can also be driven with 6 as the motors will still turn with 6 motors.
https://www.thingiverse.com/thing:4197520/files
Enjoy There free to download

By animator28
— Last update
Discover more robots

Rb550f's Meet Go 2
GO 2 robot with Windows 10 tablet and EZB V4 controller, 30 in tall, tilt head/tablet, waist rotation, quiet 6"...
Drephreak's New Robot
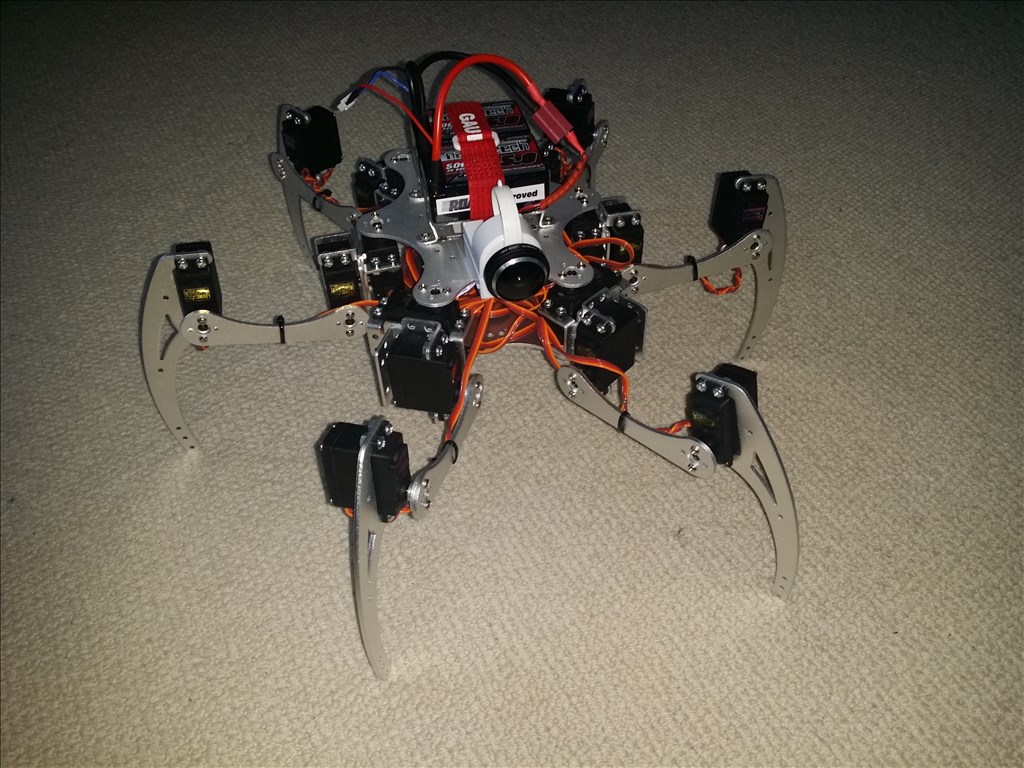
Hexapod using EZ-B and Synthiam ARC-walking in 2 hours; easy programming, aluminum chassis, servos, sensors, planned...

Linux's Project Omega Status
Omega robot build 75% complete using Rad Bot 1.0 tracks and plexiglass; pending neck/head, wiring, motorized tracks, RGB...

Exactly For me I imagine androids exploring space and exo planets. We can use them as a window into exploring these new places in the solar system.
There are so many possibility's on how useful they will be on a basic level customer service jobs. On a more advanced level repairing space stations and mars bases.
The dumb robots of today will just need an AI update and become smarter.
Making these legs open source and free to everyone will get us closer to those goals
I had this other idea to
weigh down the feet with weights for balance and stability.
What if we put Solenoid Lift Holding Electromagnets attached to the feet?
The android Could climb up steel structures
Just a thought.......................
Hey, I actually agree with @DJSures, you should make those parts connectable to an Inmoov...I am not an Inmoov builder myself, but doing so could get this huge base of builders to pay closer attention to what you are doing!
Your robot looks great! I cannot believe you are having the parts printed at some company...must be insanely expensive!!
Really great work!! Looking forward on further updates!
Your robot design is fantastic, I will enjoy seeing its progress!
I second making the parts connectable to a Inmoov, as I'm a Inmoov builder, but I assume that would be a huge task to modify now?
Whereabouts are you located in the UK? I live just outside Reading in Berkshire.
Mickey666Maus These can be printed on a hobby printer. I am printing them on my 3d printer anyone with a 3d printer can print them
Really nice leg design. They 'look' like they will be very functional but are there enough degrees of freedom in the joints to walk? With no side to side articulation in the hips and ankles how do they shift weight?
I like your work, it is inspiring.
Perry_S
Thank you
I have updated the file now to have Potentiometers on each joint for positional rotation there is a different rotation for each leg in the hips. The hips are also attached to the torso with large 3d printed actuators connected to the hips and the torso to shift the weight.
So a twist in the top part of the right leg and a lift off of the opposite foot on the left leg whilst also twisting to push forward at an angle whilst counter balancing with the torso twist (all while bending the knees)........... For an example
The feet will also be weighted down
lets see how that goes lol there will be an accelerometer to help as well

Adding these Potentiometers will effectively turn the parametric slew motors into giant servos. Got to thank @DJSures for that one and the community helped me understand how i can do this with the hbridges and the ezb as wellyou can check the update here https://www.thingiverse.com/thing:4197520
And the torso of my robot here
https://www.thingiverse.com/thing:4166931
There is a ton of rotation degree in all 12 joints