joinny
Japan
Asked
— Edited
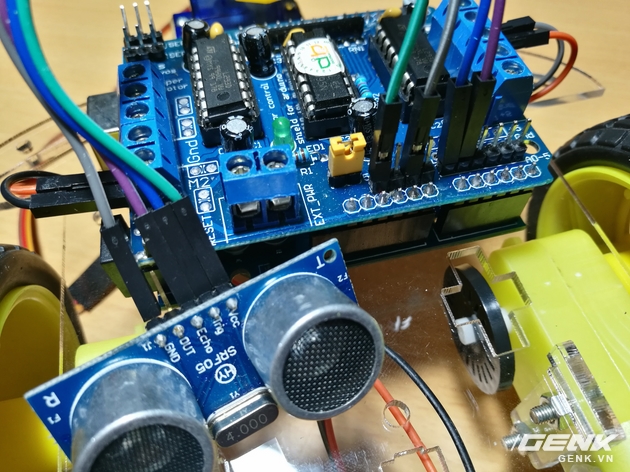
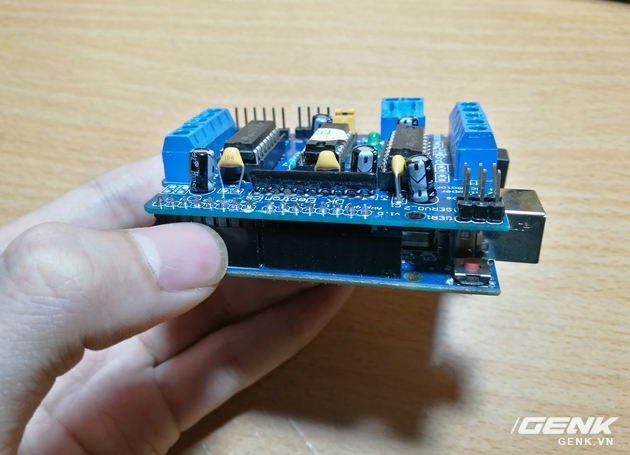
Ez-Arduino With L293
I used the L293 module connected to arduino, the ultrasonicsensor to make the rotbot automatically avoid obstructions, so when I turned the arduino into ez-b, I could connect it to L293, the ultrasonic sensor and do that project withez-cript similar to the code C++ II wrote and it doesn't seem to work?
Related Hardware (view all EZB hardware)

Arduino Genuino Uno
by Arduino
Program Arduino Uno with EZB firmware for Synthiam ARC control; pinouts, PWM pins and frequency details for Arduino boards.
USB
Servos
12
Camera
Audio
UART
✕
I2C
ADC
6
Digital
14

What tutorials did you follow that weren’t able to assist? You looked at the hbridge control manual? And the ultrasonic distance sensor manual? I don’t see either of those controls added as reference when this question was created.
I would start by following the tutorial on connecting an arduino to ARC. If you look at the synthiam's arduino uno hardware page in the getting started guide, there are specific step-by-step instructions.
Here's my recommendation
Program the Arduino Uno with latest firmware to turn it into an EZ-B: https://synthiam.com/Hardware/Arduino-Genuino-Uno-17527
Follow the steps on the above link to connect ARC to the Arduino Uno via USB
Add the PWM HBridge Movement Panel to your ARC project and specify the ports in the config for your sheild: https://synthiam.com/Software/Manual/4-Wire-HBridge-PWM-16067
Add any of the ultrasonic controls that best suits your requirement for navigation. Simple obstacle avoidance could be done with this: https://synthiam.com/Software/Manual/Ultrasonic-Radar-16101
Oh yes thanks , that's what I should review and will do it tomorrow