
MTP
Vietnam
Asked
— Edited
Error Updates Plugin
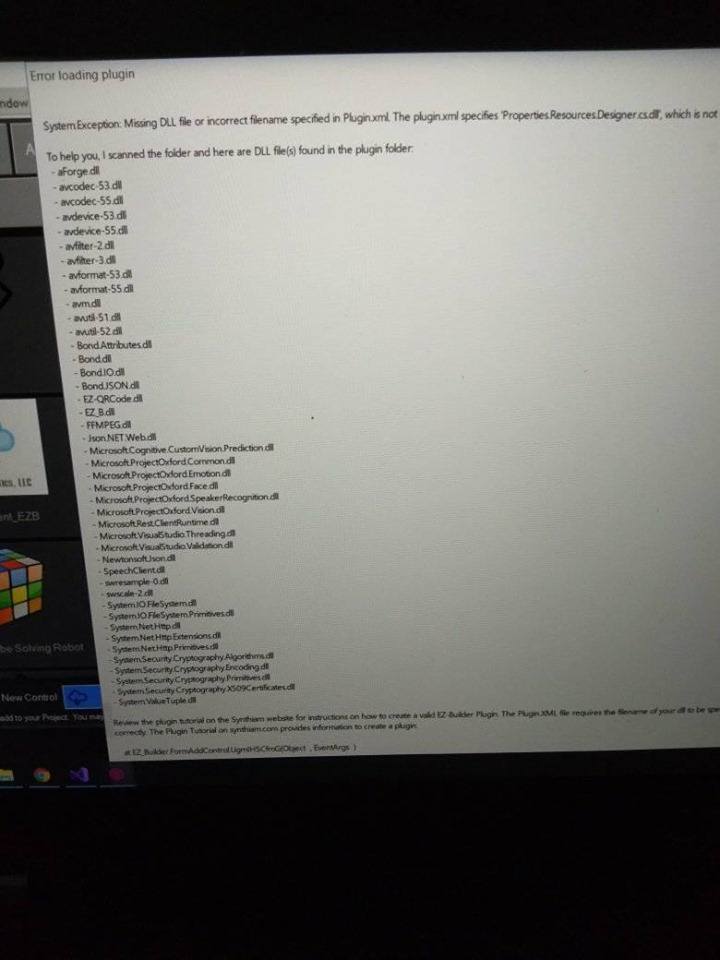
Thank you to all the communities who guided me in my questions, but I encountered the correct error in uploading the plugin. The first time I uploaded the plugin, I mistakenly recorded the plugin's DLL file and it was reported as an error. . But when I fix it and reload, I still have it. Even if I change another plugin.xml, I still don't see the new plugin file, but I found the old plugin to have an old error. Hope the community will help me succeed with my first plugin?
Best regards
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

Please follow the instructions on creating a plugin. You’ve missed the step to NOT copy files for the references ezb.dll and ARC.exe
wow after i copy the file for EZ-B.dll and ARC references, i get a lot of errors like this link: https://synthiam.com/Community/Questions/Type-Or-Namespace-ezb_connect-Does-Not-Exist-In-The-Namespace-751 although I have bundled Ez.SDK in the project
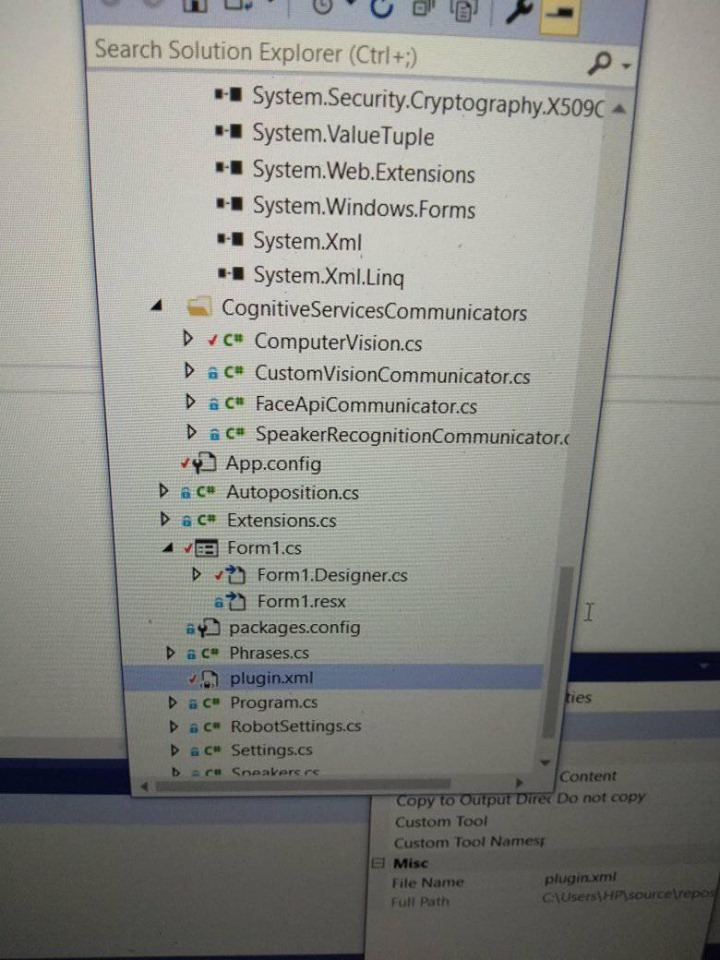
DJ please help me, I have an error that can't add reference to ARC.exe, I don't know if it's an error that my plugin can't upload but take a look at these error pictures, moreover could not find the dll file after downloading the plugin
You’re not following the tutorial. I had explained to NOT copy the files and your response is that you did copy the files. Follow the step by step tutorial that many other people have. I’m sorry but there’s very little anyone can do other than do it for you. The tutorial has actual step by step instructions. All you have to do is perform each step. If you skip a step, it won’t work. Just like all things with computers, you have to perform each step.
DJ, sorry for slow feedback for a few reasons. I have followed what you asked for, even though watching live hacks everything is so smooth, there are some error such link :https://synthiam.com/Community/Questions/Type-Or-Namespace-ezb_connect-Does-Not-Exist-In-The-Namespace-751, but I have not found the solution. I have added the ez.SDk package and Reference EZ_B.dll package,ARC.exe. And the code is not wrong because this application has been built
Error CS0234 The type or namespace name 'AutoPosition' does not exist in the namespace 'EZ_B' (are you missing an assembly reference?) ClassLibrary16 C:\Users\HP\source\repos\ClassLibrary16\ClassLibrary16\Autoposition.cs Error CS0246 The type or namespace name 'AutoPosition' could not be found (are you missing a using directive or an assembly reference?) ClassLibrary16 C:\Users\HP\source\repos\ClassLibrary16\ClassLibrary16\Autoposition.cs 15 Active AND warning: Warning Resolved file has a bad image, no metadata, or is otherwise inaccessible. Index not found. (Exception from HRESULT: 0x80131124) ............\Program Files (x86)\SynthiamInc\ARC.EZ_B.dll ClassLibrary16
Warning Resolved file has a bad image, no metadata, or is otherwise inaccessible. Index not found. (Exception from HRESULT: 0x80131124) ............\Program Files (x86)\SynthiamInc\ARC.ARC.exe ClassLibrary16
this my code: using System; using EZ_B; using EZ_B.Classes;
namespace EZFormApplication {
Best regards