
kslaxme
India
Asked
Wiring Stepper Motor
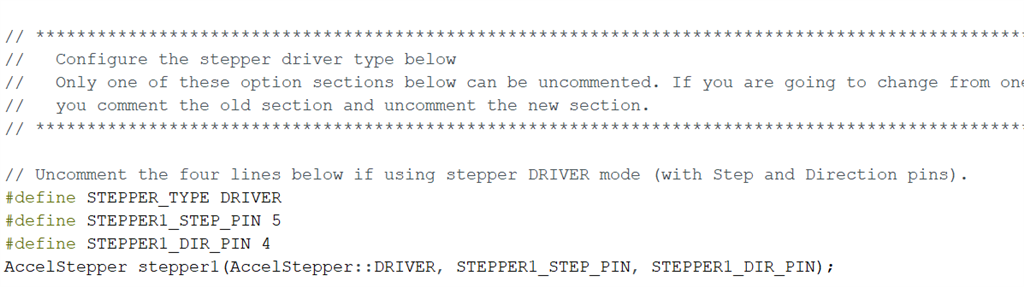
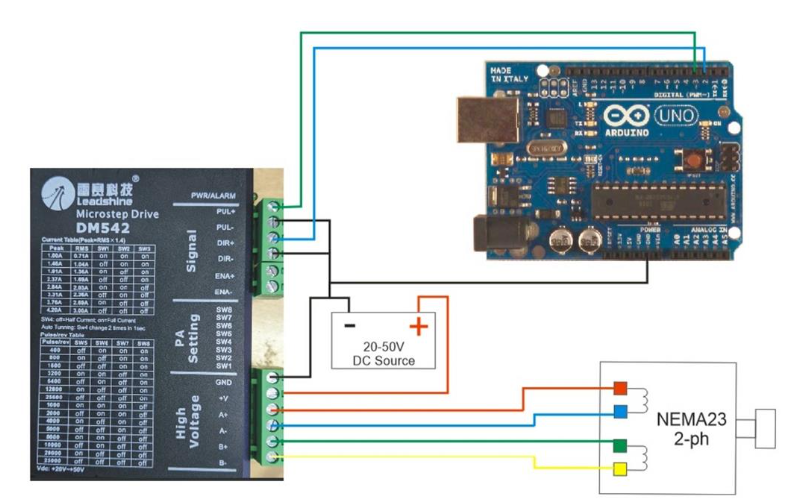
I am using a Leadshine Microstep Drive DM542 stepper motor controller connected to a NEMA 23 2-phase stepper motor. I followed the same wiring connections as specified in the documentation.
Here are the images of my setup for reference:

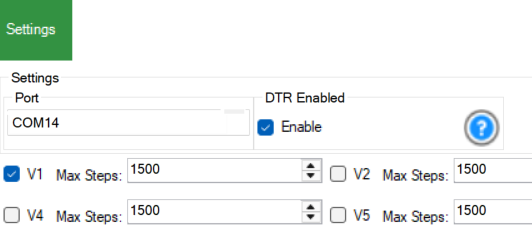
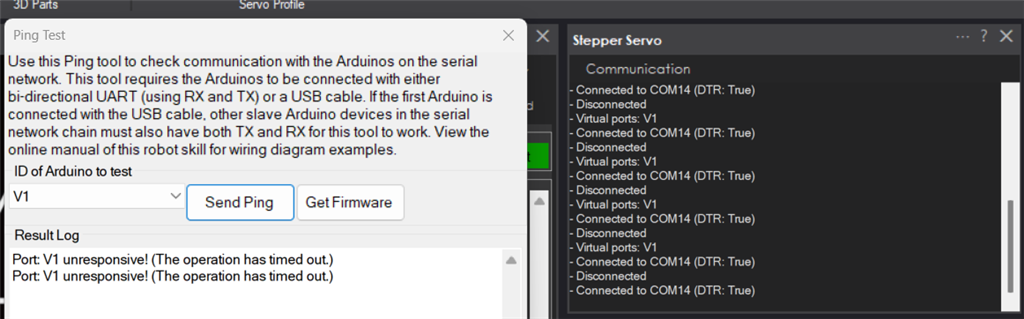
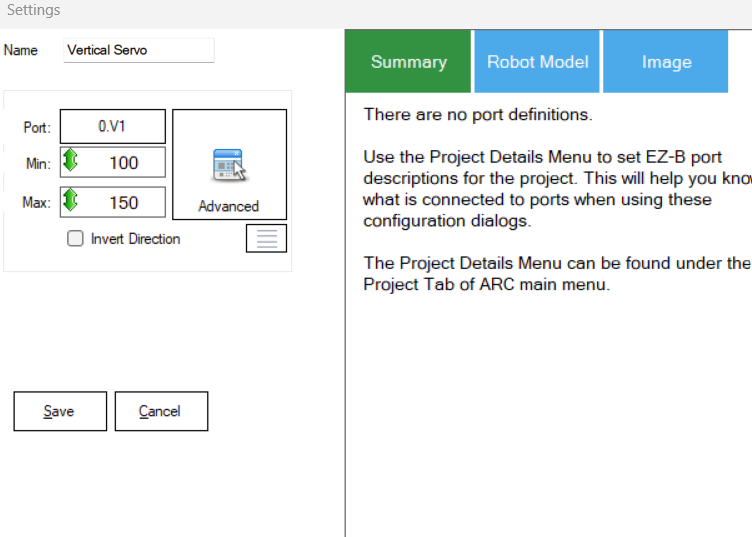
When I tried to ping the motor using the Stepper servo robot skill in Synthiam ARC, I did not receive a response. I followed the instructions and configured everything as directed. However, the motor is continuously moving back and forth in very minute steps. Could someone help me understand where I might have gone wrong? Additionally, how can I configure the stepper motor to function like a servo motor?
Related Hardware (view all EZB hardware)

Arduino Genuino Uno
by Arduino
Program Arduino Uno with EZB firmware for Synthiam ARC control; pinouts, PWM pins and frequency details for Arduino boards.
USB
Servos
12
Camera
Audio
UART
✕
I2C
ADC
6
Digital
14
Related Robot Skill (view all robot skills)

Inverse Kinematic Arm
by Synthiam
Control robot arms with inverse and forward kinematics, converting X/Y/Z positions into joint motion and reporting end-effector location.
Requires ARC
v12

Check the wiring because it’s not correct if that’s happening.
also do no hijack anymore threads or you will have forum access revoked. This is your last warning. Use your existing threads for the same topics.
This is for kslaxme- stepper motors are a whole different animal than typical servos. They start at 1 and go to whatever you want. Say you make top end one thousand steps you start at one , go to 1000, if you go to 500 that is your center point. There are all kinds of learning curves with this one.
This is for kslaxme- your min starts at 100 and max at 150. This is totally different from servos -we are talking about pulses pulses pulses At a minimum it's 400 pulses to make one revolution on your driver so if you go from 100 to 150 its 50 pulses 1/8 of a turn you won't see it even if it happened.