
PRO
afcorson
Australia
Asked
— Edited
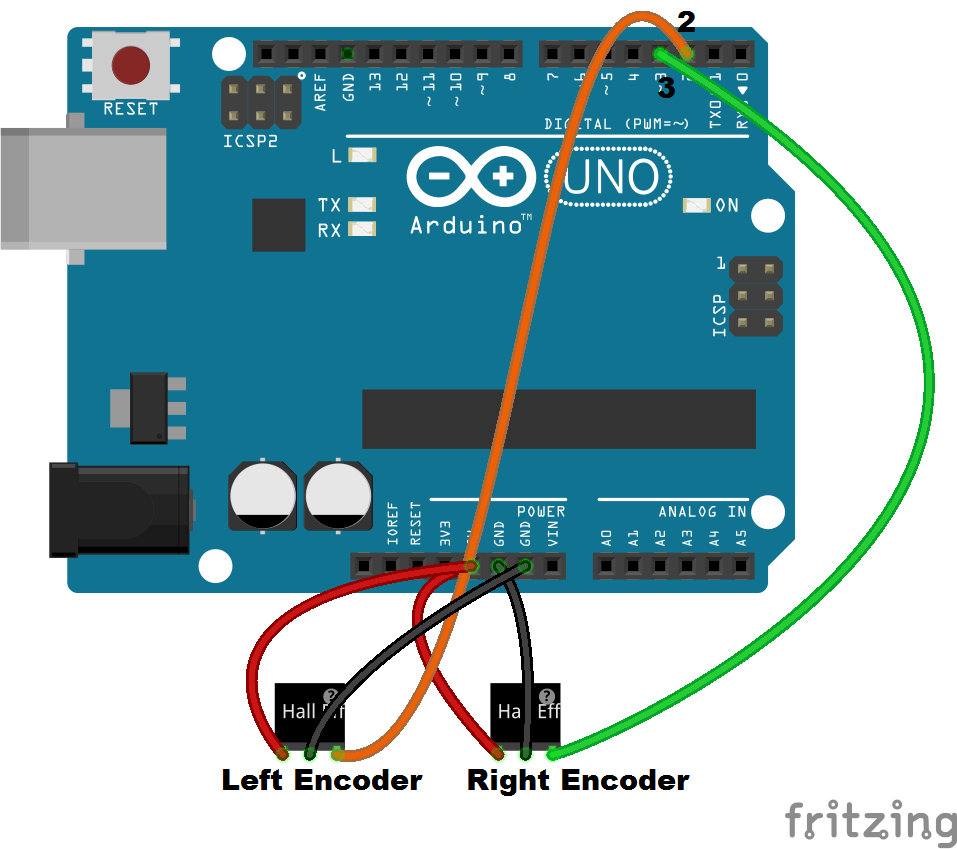
Does anyone have a wiring diagram to connect an EZB, Arduino UNO and two continuous servos to use the Wheel Encoder Skill?
Related Hardware (view all EZB hardware)

Arduino Genuino Uno
by Arduino
Program Arduino Uno with EZB firmware for Synthiam ARC control; pinouts, PWM pins and frequency details for Arduino boards.
USB
Servos
12
Camera
Audio
UART
✕
I2C
ADC
6
Digital
14

It's near the bottom of this page in the manual part (above comments): https://synthiam.com/Support/Skills/Navigation/Wheel-Encoder-Counter?id=17591
It is in a section titled "How to Use Wheel Encoder Counter"
Ok. That section refers to connecting a BN-880 compass. I have the EZB controlling 3 continuous rotation servos, each of which needs to have rotations counted by the Wheel Encoder Counter. I can't grasp how the servos can be controlled by the EZB and the UNO receive data on their rotation. Obviously something I am missing here.
Click on the link, DJ post #1
. Read that manual one that link comes up from top to bottom stopping at B - 880 campus.
read it several times it’s all there that Dj postage you the link.
also, watch the entire video that Dj has also posted on the same link
I don't see any info about a compass in DJ's link.