robotdude
Canada
Asked
— Edited
Weak Thumper 4Wd
I'm trying to build a mid-size robot using the Thumper 4wd and two 2.5 Amp motor controllers and 12v/12Amp battery to run it but I don't have torque to turn it around (only to go forward/backwards). Actually I can easily stop the wheels with my hands. However if I will connect the motor directly to the battery I can't stop it from turning. So my guess is that the 2.5 amp is not enough or something is wrong. There is any quick fix for that on the 2.5 amp controller or should I get a new motor controller? Or. I'm pushing the unit to the limits Help..

Sounds like the LM1084 voltage regulator is dead. You will need to get an EZ-B PCB without chip and bluetooth. Just the board, and swap your components over. To get that, you'll need to Contact Us.
DJ, i think you are right. I also believe that it's the LM1084. Can i just get a new LM1084 and replace it with the defective one? Also, what will make the LM1084 to fail? It was working fine for some time and then suddenly it failed during programming.
Could it be that the 12v 12ah battery was too much for the EZB?
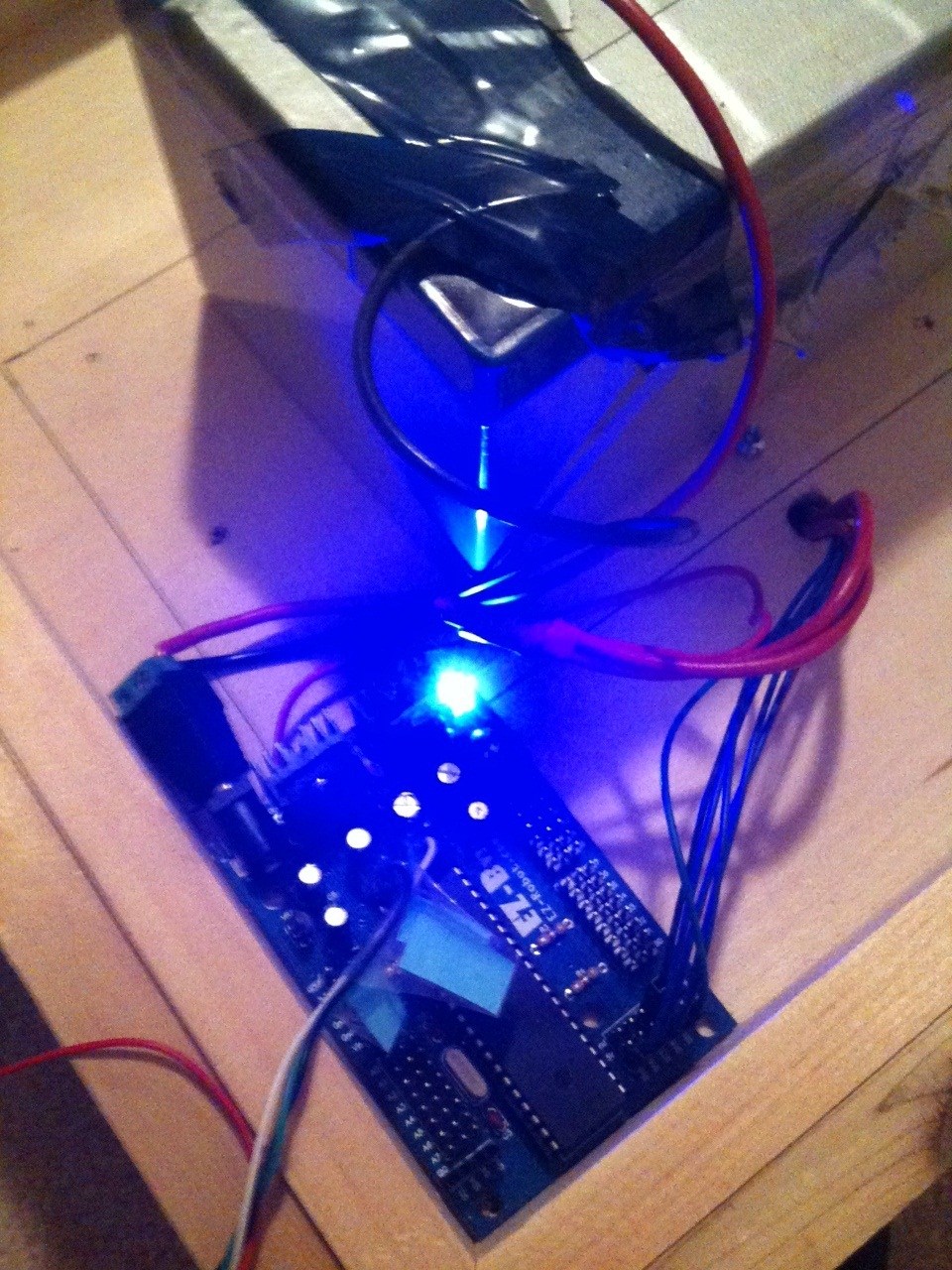
Ok, so nothing has changed after replacing the LM1084 voltage regulator with a new one. I can connect to the EZB board (even upgrade the firmware) but I cannot send any servo movements nor get any feedback from any of the sensors connected to it. Any idea what else I should replace to make the EZB alive again?
By any chance do you have some LEDs sitting around? Connect your ezb and you should have solid led on the board and bluetooth status lights. A quick way to test your signal pins is to use a servo ext cable and solder long lead to pos and short to neg. Plug it into a port on ezb and then use the pwm slider. Choose that pin number and turn the slider up , if it blinks faster till it gets solid as you turn the slider up then that port is working properly. Test all your digital out pins this way.
Also I would delete the Bluetooth profile for the ezb and uninstall then reinstall ARC just in case the software interface had been corrupted by a bad sector on your hard drive just to be sure.
Thanks for your LED suggestion. I will give it a shot. The EZB is connected directly to the computer with a USB TTL cable. I have tried different computers but got the same results. I will remove it and connect the Bluetooth again to see if it changes anything.
So, after replacing the LM1084 a few times, checking every component and putting back the Bluetooth module, the EZB is still dead. After tracing every part i realized that there was no voltage passing to any of the digital ports. So my conclusion is that there is a problem in the PCB connection somewhere between the layers. By creating short-circuit and connecting the 5V directly I managed to successfully bring the EZB back to life. Finally I can continue with the development. yahhhayy