

Using The B5t-Hvc Vision System
For testing I built a temporary housing for the B5T which also allowed me to add a tripod mount which makes things easier
I have 4 faces currently registered in the album (the B5T allows for up to 500 faces to be registered) each with only 2 recognition templates (you can have up to 10 templates per user) and the B5T has never yet made a false recognition! I use photographs of people for face recognition testing as it saves me calling people into the lab all the time for these tests. One photo I am using is John Connor (from the Sarah Connor Chronicles TV show) which makes a good test subject. Face recognition on the B5T is superb and even works well in low light. The body and hand detection also work well as does face detection and direction. Age, gender and gaze estimation all work great and the icing on the cake is the face expression estimation function, now the ALTAIR robots will know when I am not happy with them!
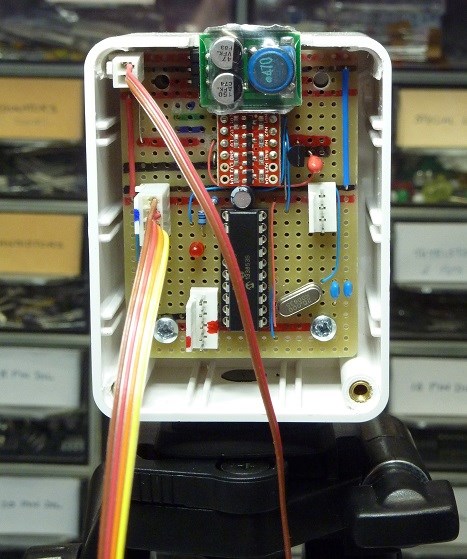
I have used a microcontroller as a data buffer for the B5T (this being a PIC18F14K50) as there is a lot of high speed data comms required if you want to use all of the many B5T features and a direct connection to the v4 may flood the data channel. The PIC gets all the current data then compresses it into a small data packet that then gets sent to the v4. The PIC buffer board plugs into the B5T (UART sensor board) the same way as the USB dev board does.

This is the B5T/PIC output with just me in view
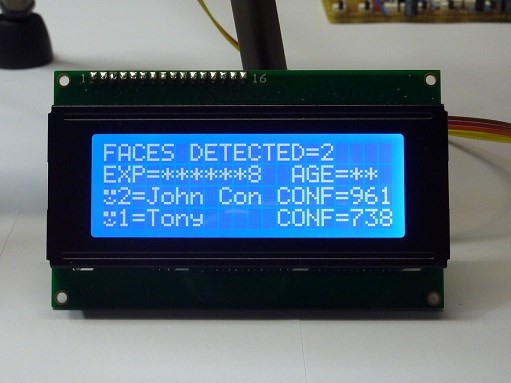
Here is the B5T/PIC output with me and John Connor in view

Here are the boards outside of the enclosure
It is amazing to see the humble PIC microcontroller being a part of advanced face/gesture recognition! admittedly it is with the help of the awesome Omron HVC chipset, the B5T sensor board is one great piece of kit!
Tony

That's great! very neat. I dig your hacks.
Very very cool!
Nice. Your a mad genius Tony.
Great job Tony!
WOW, Tony, that is awesome. I'm blow away by your test results, I expected you to say it was garbage.
And I see you are fan of The Sarah Connor Chronicles....I miss that show.
Great work Tony and so fast with the results - i see great things ahead for the B5T. !.
Thanks DJ and everyone for the kind words, I have had a lot of fun working with this sensor board!
Here is the PIC displaying face detection mode, where you get the X,Y coordinates of the detected face (great for tracking) and also what is very useful face size - its possible to get the approximate distance of the face from this.
Justin, I am a big Sarah Connor Chronicles fan, its was one on the best things on TV, very disappointed when they shelved series 3 as the story line was getting very interesting!
Tony
For David and anyone else interested in using the B5T vision board here is the pin-out for the 0.1" 6way header on the back of the board this can be connected to via a 0.1" socket - remember that the B5T UART is 3V3, I made a lead up that does the conversion as the B5T must have +5V supply and is controlled by a PIC with a 5V UART. I have used a logic level convertor and 3V3 LDO regulator in the cable lead
Direct connection to the v4 will be slightly different as its UART is 3V3 so no logic level conversion is necessary.
Tony