
Perses
USA
Asked
— Edited
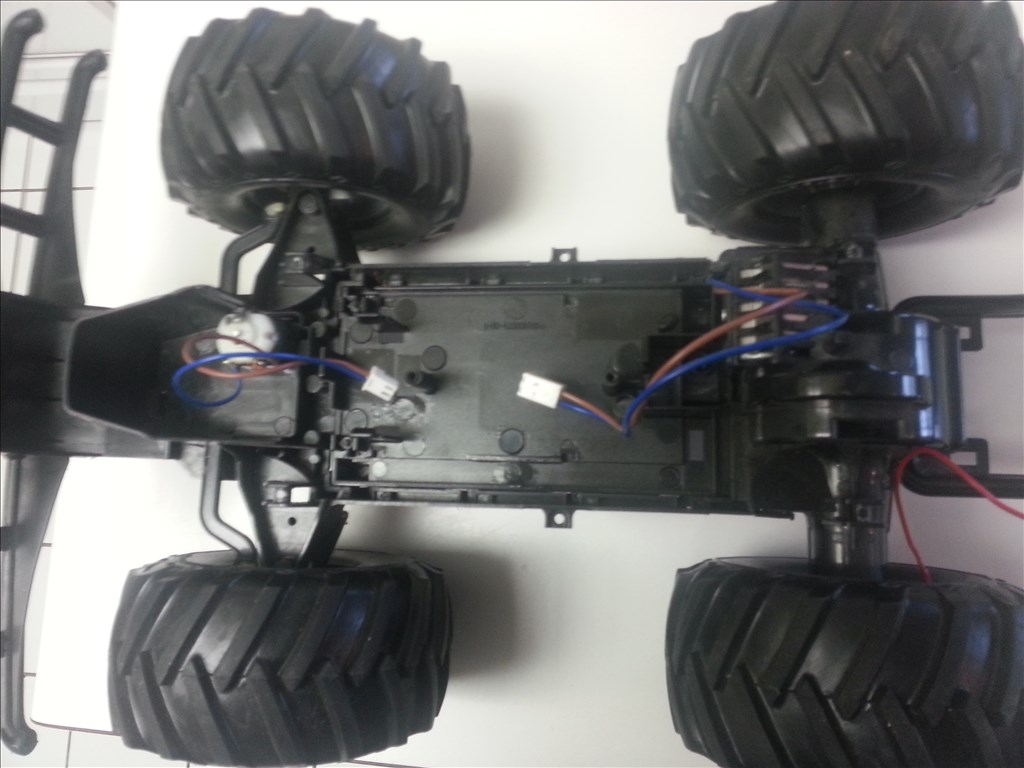
I got a couple of newbright 12.5" monster trucks "raminator" Was looking to plug the chasis into the ez-b. So i opened it up, its got a board with two connections and holds one battery 9-6v. Connects one to driveshaft and gears & motor, and one to steering servo. The antenna is also wired to the board

So, im looking for some pointers before i break it
Also, i was thinking about just removing the board, and just using the servo and motor, but then i cannot use the battery, so i was hoping that theres a way to control the board through the antenna wire instead?

Want to make it autonomous, but, maintain the current motors. Currenly, they run on two wires instead of 3, so im a little confused how to connect them
You may find this document helpful to show you some motor connectivity with micro controllers and h-bridge Probably what you have a motor using 2 wiring that works by reversing polarities to go for the different directions.
L298 dual H-Bridge
You will need to use the multimeter to trace all connection for more assurance.
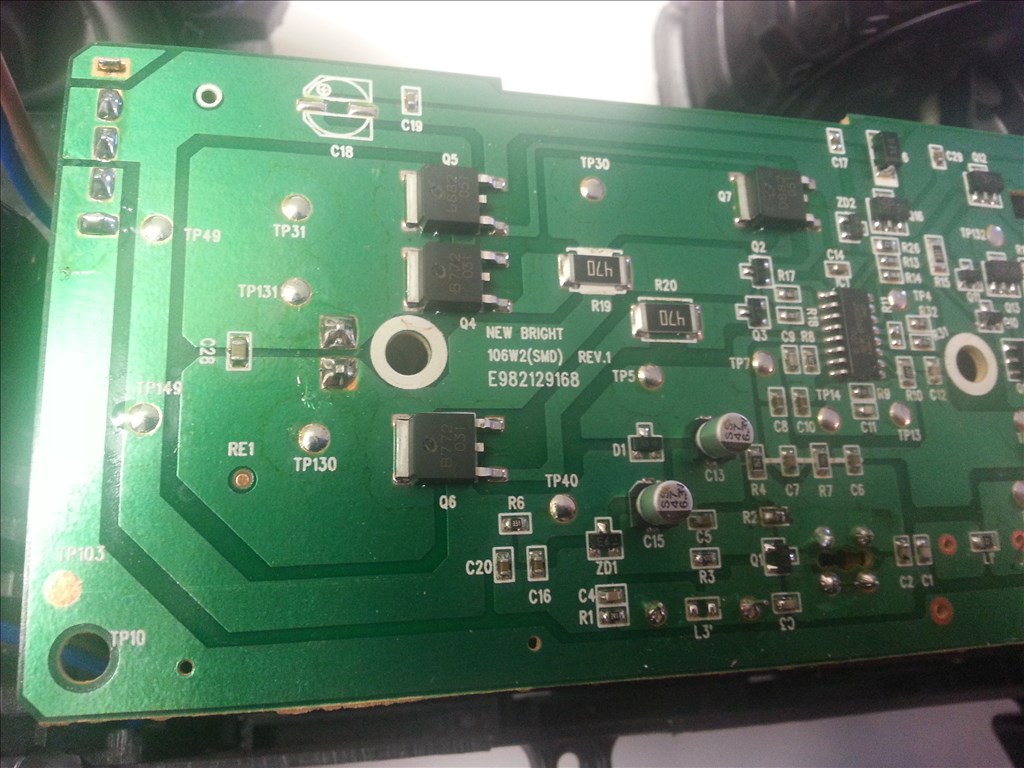
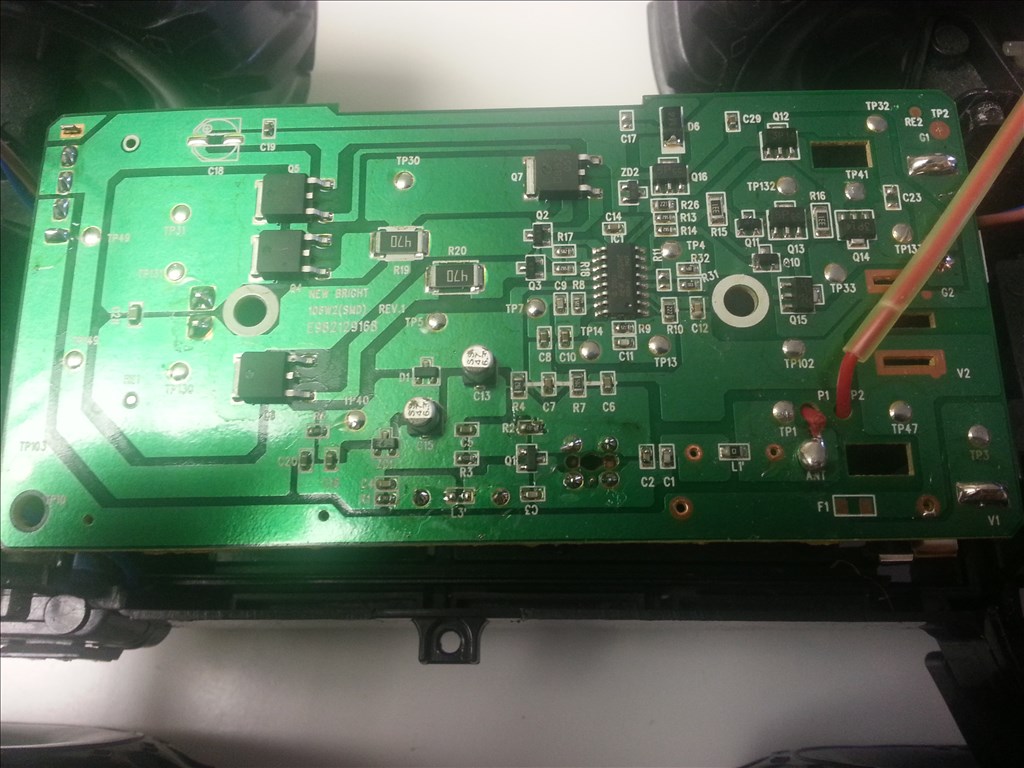
I also have 3 R/C truck that I would like to use with my EZ-B's. From hours of internet research, I concluded that most modern R/C cars / trucks used the RXC2 chip as a micro-controller. Determine exactly your goals for the R/C vehicle before making any changes. Locate the micro-controller. Hint it is near the middle screw hole and have a total of 16 pins outputs. If is the RXC2 chip, here is the data sheet.
If not simply type the micro-controller model number on Google image search and it should give you a picture of a data sheet.
you can use the built in H-bridge controller and solder directly to the chip pins out. , Left, right, front, backwards.
you can grab a Dual H Bridge DC Stepper Motor Drive Controller Board for less than $10 and completely remove the R/C truck circuit board. replacing with arduino
keep the truck stock without any modification and tap into the remote control signal ( also should have a mini rxc2 chip)
I have done step one and two forward and reverse seem to work just fine, but had trouble with left and right, eventually got side track with Robosapien Rover 5 chassis and abandone the R/C trucks. maybe we can put our head together and figure it out. I' ll do some testing Wednesday and will give you an answer.
Awesome! Didn't know theres an on board h-bridge
check out this Thread
Hey DemonN,
Logic check on my plans below please?
I just got a good deal on a Radio Shack Monster Truck. I plan to put the EZ-B with the trucks remote controller in the back of the truck. Then attach the EZB to the factory remote controller and not touch the electronics in the truck itself.
When the grounds are connected between the two boards I can send a low from the ez-scripts digital out to the contacts switches in the remote controller and whallah!
The truck is rated to go over 30 MPH. No esc's or truck mods should be needed...
If I don't trash the thing, I'll later put a MS Surface Pro running Win 8 inside the device for infinite autonomous range.
I'll put the MMA755 Acelerometer (which I love, is cheap, very accurate and easy to use with DJ's latest EZ-Script update) inside the truck so it can learn to autonomously climb things without ever getting into excessive leans that would cause it to flip. I'll back up an renegotiate but always be moving upward.
I'm almost done with a proof of concept with the tank chassis with these behaviors and will post a video of that this weekend here. I love the tank to test things out without breaking things. I learned that lesson after destroying my AR Drone.
Thanks,
Bill...
excited to see your progress