
Asked
— Edited
Unable To Use Motion Sensor
Hello,
I have just received my first EZ-Robot order and it was great to see how fast it was to get the camera up and running. Unfortuantely, my ultrasonic sensor does not appear to be working.
It looks like I have the same problem as here: https://synthiam.com/Community/Questions/6087&page=3
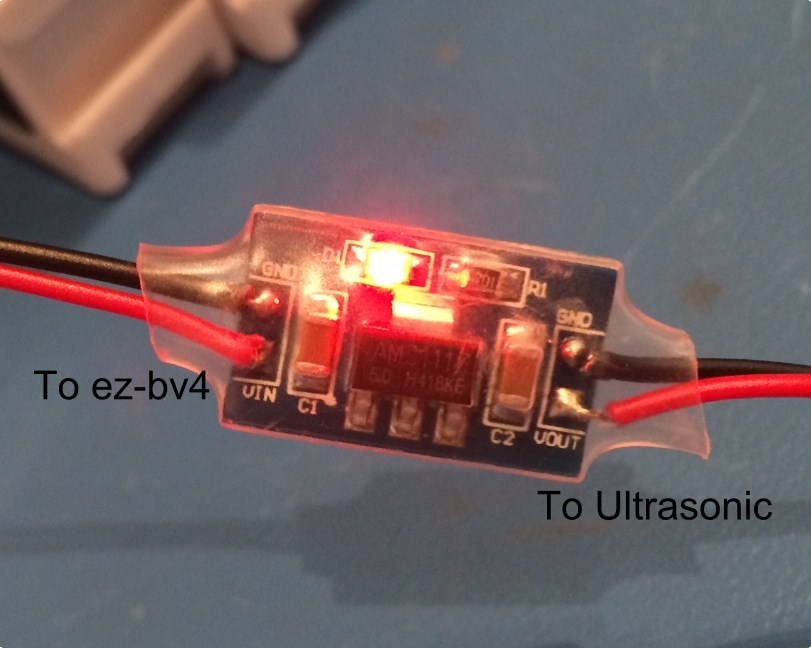
I can see the LED is on in the in-line voltage regulator and I've metered the digital control pins with a meter and see that I can set the values [ set (D10,on) for example), so it looks like the EZ-B is fine.
Can you help with confirming the green and white wire connections (which is signal and which is read) or let me know of anything else that I could be wrong? (The exchange department mentioned I needed to post here before going further)
Thank you, Dan

Hmmm, you can't use the sensor with this "set (D10,on)"?... You will need to remove that and just open the Ultrasonic distance control to test the sensor... the one that shows the value of the sensor... Assuming it is hooked up correctly if it shows a constant value like 255 it may be not working...
@danb, Try this;
In this example the Trigger is connected to Port D0 and the Ping is connected D1 If it detects something within 65mm servo D22 should move to Postion 13
You might have switch the Trigger and Ping wires around.
To answer your question about confirming the wire colours Dan, the white wire is trigger and the green is echo so you will need to use two digital ports. Try connecting the sensor to the EZ-B as follows...
Click here and scroll down to the "Six-Distance sensor" project which is second from the bottom and download it. Adjust the digital ports in the ARC project to what you have your ping sensor connected to (in your case, D10 and D11 for echo).
I have the same problem. One of my sensors is stuck on 255 as well. I know that it must be the sensor as I have others that work fine. I hope I can return it,
These sensors are very sensitive to over-voltage. If you used it without a voltage regulator it is certainly ruined. Even if you used it correctly, they do sometimes burn out. They are also dirt cheap. I think you can get them on eBay (without the EZ-B voltage regulator or plastic case, which you can re use) or local electronic distributors for under $3. Search for HC-SR04.
I keep a couple of spares and would send you one but the postage from the US to Australia is far more than the part is worth.
Alan
Dear Alan
Thanks for the offer - in fact I think this just shows how remarkable the forum is for this kind of help to be given. In fact I bought 4 and 3 of them are working fine so I have more than enough. Happily they come with the voltage regulator already wired in so there should be no problem with the voltage.
This is not the problem with the faulty sensor but do they only work on certain connections to the EZ-B? I can't get any of my ultrasonic sensors to work on D23 and D22 but they spring into life on D7 and D8. I can't see that this is likely to be right but I think it is worth asking.
Also I notice that sometimes servos and motors on the roli don't work until you play with the controls and then all is good again. Is this normal?
I am having fun and certainly much more fun that work !
Cheers from sunny Sydney
Chris
I haven't heard about them not working on a specific port. I'll have free time Thursday and will try it out on those ports.
Very rarely I have the issue where Roli is unresponsive until restart him. Usually when the battery is starting to get low but before the low battery alert goes off.
Alan
Mind you I could not get the servo that works with the motion sensor working on these high port numbers either so perhaps there is a problem with my EZ-B ... I am sure that I will identify if the problems are real over the next few weeks. Happily I have two EZ-Bs so I am sure that I can narrow things down.