
wakon
Unable To Calibrate Adventurebot Servos
I was hoping someone might have an idea what else I could try ... So I got a brand new AventureBot on the weekend to start a simple robotics class at my school in the near future (and retiring my Ozobots). Watched - among others - the servo calibration video and followed the steps; easy enough. With both servos I get that one spot where no wheel spins at all, both servos keep making some buzzing sound though. Then "Move forward 1m" or a movement command in ezBlockly ... same result: the bot does not move straight, not even close to. So back to the "Continuous Rotation servo Calibration" screen on my Android tablet, tab 'D0 to 90' and 'D1 to 90' and ... Did this now at least 25+ times and the bot goes in a curve (to the right), sometimes a little less and sometimes more. I happened to reverse the inner 6 servos of a hexapod when I assembled it the first time, so I wouldn't be too surprised if messed something up again ;o).

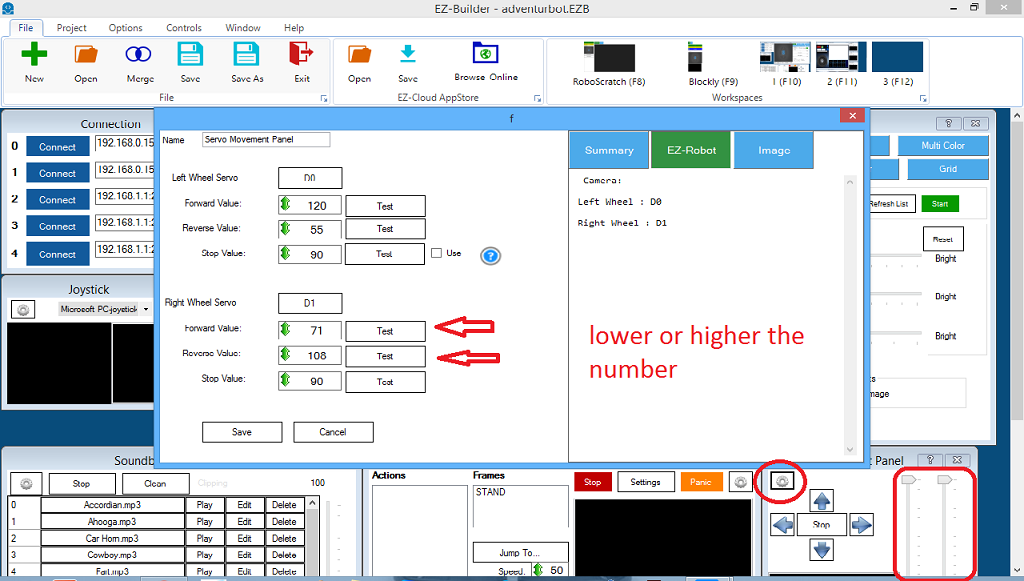
click on the gear icon.see pic in the movement panel.lower or higher the number , excample by 3 and press test.
Thank you very much Nomad 6R. Looks like I have to get myself a Windows machine with ARC a little earlier than I thought I would need to.
You don’t need a windows machine . What you’ll new to do is follow the robot program tutorials for your product. In this case, it’s adventure bot. Click on the word "learn" from the top of this website on the menu bar with the mouse cursor. That will bring you to the learn page. Then, select your product "adventurebot"
. What you’ll new to do is follow the robot program tutorials for your product. In this case, it’s adventure bot. Click on the word "learn" from the top of this website on the menu bar with the mouse cursor. That will bring you to the learn page. Then, select your product "adventurebot"
There’s tutorial on using the product - which also shows the calibration AND how to enter speed values in Blockly for left/right servos to have the robot move straight.
As for RoboScratch not moving straight with the preset distance commands, we recognize the limitation on mobile and have updated continuous rotation servos ready to be released soon. In the meantime, use the forward commands in RoboScratch and set the speed for each wheel to make the robot move forward.
Have fun
Thank you for your reply! I thought what Nomad pointed at is sort of a servo profile which would take care of the issue with one servo going a bit faster (or slower) than the other; kind of a fine tuning. Wrong assumption? Now using different values for left and right speed (in blocky or scratch commands) to get it to move straight seems a little awkward to me. Gotta "remember" the values (maybe for several bots) and to use them correctly for varying speeds every single time etc. Mmmm.
wakon
sorry i didn read that you where using blockly.
Nomad, no problem, I appreciate your help. I wasn't very specific.
If someone could clarify a couple of things for me that would be really great.
If the "Continuous Rotation servo Calibration" does not get the bot to move straight (wheels spinning with same speed) as shown in the tutorial, is there a problem with the servos then?
I will get a Windows machine shortly but in the meantime: is there a servo profile for the AdventureBot in ARC which allows to adjust speeds of servos for it to move straight? In other words, after loading such profile, would an ezBlockly command with Left-Speed = Right-Speed = 100 (e.g.) work (instead of 100 and 110 or alike)?
If the answer to #2 is no, does that mean one has to add an offset to every single movement block when using ezBlockly (or scratch) in order to have the bot move straight?
Sorry to be so inquisitive about this and I hope I do make at least some sense . I have a group of young elementary students who have been working with the Ozobot before. It has 2 micro-motors, one per wheel. The students have experimented to have the Ozobot go in a circle etc. by only changing the wheel speeds accordingly (same wheel speeds makes the Ozobot move straight). For them it would be so counterintuitive to have to add some offset to the speed every time ... I want this group to transition to ezRobot but using only RoboScratch and ezBlockly for a while. Thanks a mil'!
. I have a group of young elementary students who have been working with the Ozobot before. It has 2 micro-motors, one per wheel. The students have experimented to have the Ozobot go in a circle etc. by only changing the wheel speeds accordingly (same wheel speeds makes the Ozobot move straight). For them it would be so counterintuitive to have to add some offset to the speed every time ... I want this group to transition to ezRobot but using only RoboScratch and ezBlockly for a while. Thanks a mil'!
no problem with the servos. Specify the values for the robot to move straight as previously replied
a servo profile is absolutely not what you need. Please check the adventure bot lessons and notice there is no mention of a servo profile. servo profiles are for robots with gait movements.
watch the calibration and activities for your product (adventureBot) in the learn section by moving the mouse cursor to the top menu and pressing LEARN, then selecting your product (adventurebot). The lessons will demonstrate how the speed is set for servos in blockly, and how the calibration is done.
Here is a direct link with fantastic in -depth videos from The Robot Program that shows you how: https://synthiam.com/Community/Tutorials/81?courseId=7
Have fun
I have watched that calibration video several times and as I repeat exactly what you do, my adventure bot does not do what your one does. You adjust the 2 potentiometers until the wheels stand completely still, so do I. In the video you're saying "...and there is no noise coming out ...", servos of my bot do buzz. Then you're going into RoboScratch and set the speed to 150 for BOTH left and right speed, thats what I would expect: a bot with calibrated servos going straight precisely when the left and right speed are the same. If I do the same now for my bot it doesn't go straight at all. I watched a series of the videos you're referring to before I even touched the bot. So I am pretty good in "reading the f'ing manual" first . I do not have much background in robotics but a solid foundation in computer science, just saying'. Sorry for being a pain in the ... and I will stop here now. I shall see what I can figure out ... Thanks for having created this amazing platform.
. I do not have much background in robotics but a solid foundation in computer science, just saying'. Sorry for being a pain in the ... and I will stop here now. I shall see what I can figure out ... Thanks for having created this amazing platform.