
Asked
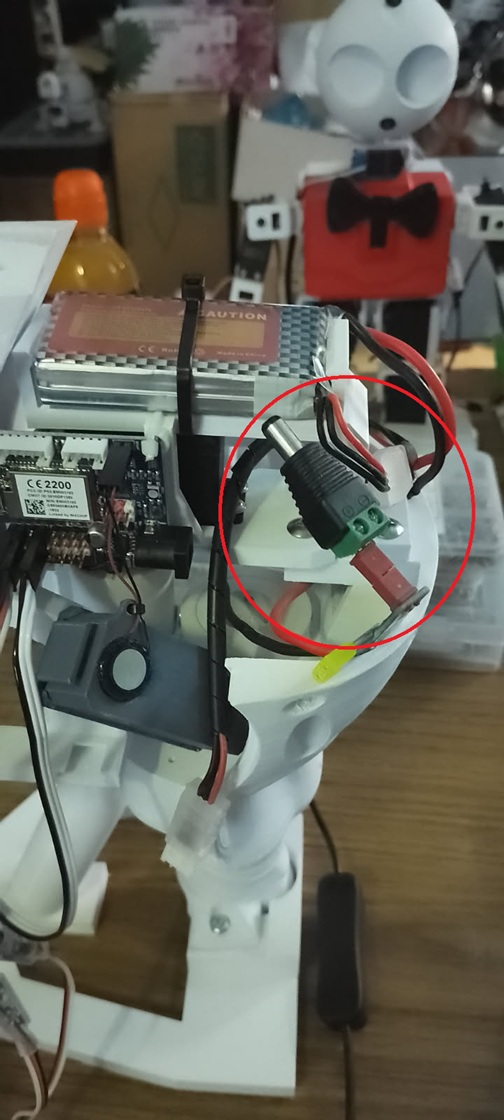
I'm using a DC jack plug for the IoTiny, but the device does not power on. The fuse is fine, and the thickness of the DC plug is 5.3 mm, which is the same as the EZ-Robot adapter. The IoTiny powers on with the adapter, but not with this DC jack plug configuration. I am measuring 8.30 volts on the screws and pin of the DC plug. The jack plug fits all the way into the IoTiny. What could be the issue?
Related Hardware (view all EZB hardware)

EZ-B Iotiny
by EZ-Robot
Control IoTiny with Synthiam ARC: 100MHz Cortex‑M4 Wi‑Fi IoT/robot controller-camera, servos, ADC, I2C and digital I/O for easy internet automation
Wi-Fi / USB
Servos
8
Camera
Audio
UART
✕
I2C
ADC
✕
Digital
✕

Hi Dave_Schulpius,
I know-sometimes even the smallest mounting issue can turn into a real mess! It’s a good reminder to always double-check the screw length and mounting hardware when working with these compact boards.
If you’re ever mounting an IoTiny again, here are a couple of tips:
It's always a learning experience, and sharing these moments helps everyone avoid similar issues.
Let me know if you have any more questions or need further assistance with your ARC projects!
Happy building!