
Asked
— Edited
hi all
is there anyone that can make me an stl file,the cost here in belgium to make an stl,is very high+cost material and chipping.also you dont get the stl file, companies says its there property.you dont have to do it for free ,but i , dont want to spend to much on it.
what do i want is a hip case ,similar like the neck part jd,but for 2 big servo's. the ones we use here ,lever servo's.color case is white.i want to give jd , some freedom more ,to be able take side steps.
the servo's comes together with no end piece where normal a screw sits. on top servo,here are some pics.
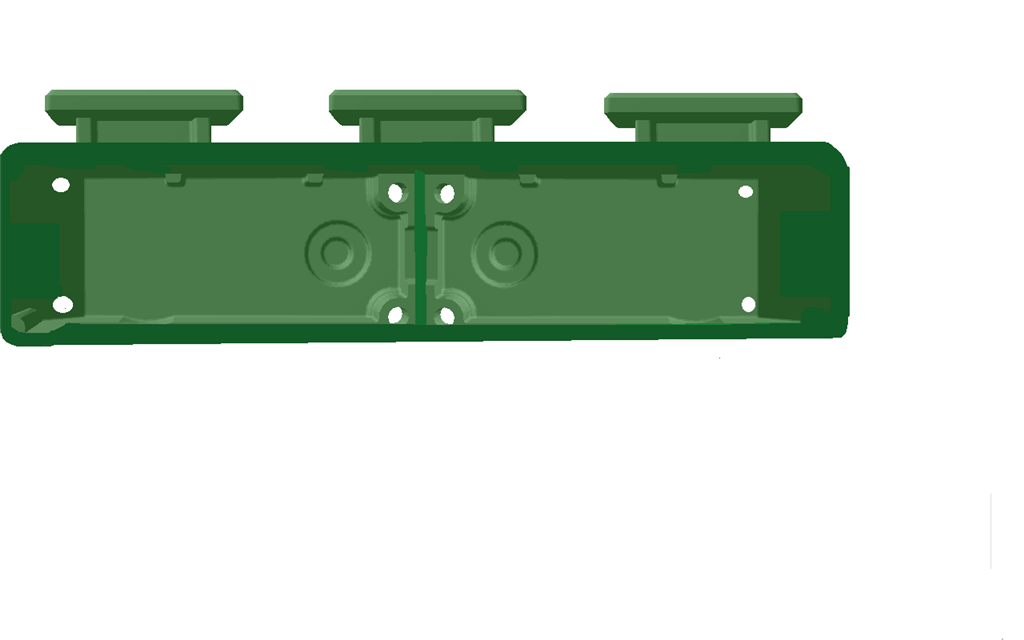

thank you

Hi Patrick,
I look forward to seeing Pinokio dancing soon.
Be Well, Ron
hi andy
pinokio has become a fully jd robot now.the head was nice but not , practical.didn get the rgb and cam in there.but he wil dance soon, or sing opera.
Opera is good,,,,,, ..... LOL
i choosed the three tenors.pavarotti,jose careras ,domingo but i dont no how to uploaded when reddy for ,sabam will be a problem.
Ha - i'm having fun with JD's new hips
it looks really great.cant hardly wait to have mine hips.
i put the brackets a little off center,again a little more freedom.
Dj.....That is SOOO cool.....
Patrick ,, good Luck with yours ...
It looks like that could be used to help JD walk without so much of a shuffle. Lean to one side so one leg is bearing all of the weight, then lift the other leg high, lean forward until the front leg touches the ground, then lean to that side to it takes the weight as the leg straightens out.
It is too bad there isn't an easy way to do a servo controlled ball joint, which is what a hip really needs, but this could really help with JD's mobility.
Alan