Aceboss
Servo Burnt Out?
I was running JD successfully last night, up until the time I had to put him on charge. Charged up the battery, disconnected after the charge. Tonight after powering him up as usual, I found one of the servo's (Port D5, his left 'forearm') was unresponsive.
Symptoms are: the servo doesn't move when instructed. The servo is able to be rotated by hand even when it should be 'locked' in place (similar to it's powered down state in battery saver mode). There's no change if I place him in the 'calibrate' position. All other servo's are in their normal calibrated position.
There was no smoke and no buzzing from the servo last night prior to powering JD down. I have disconnected the servo from the port and reconnected it as well. There are no obvious signs of the wires at either end being frayed or unusual.
I am wondering if there's anything else I can try, or if this is an indication of a dead servo? I received JD just over 2 weeks ago.
Any advice would be appreciated. Thanks.

@DJ,
I don't want to keep poking at this can of worms, but I have some ideas to consider....
And when you get more distribution channels set up worldwide so the shipping cost of small parts is not prohibitive, this may become a non issue.
You could slightly increase the cost of Revolution robots but include a spare of each servo kind used in the robot, so if someone does have a burnout while learning, they don't need to spend more on shipping then the replacement servo costs and wait a week or more before getting back into it.
Instead of automatically including it, pop up a suggestion in the online store when purchasing a revolution robot that the user might want to add a couple of spare servos as they are wear items and therefore not warrantied (or short warranty, not sure what your current policy is... I should go read it again).
2a) The idea of suggested purchases in the pop up actually made me think of a couple more. Things like when ordering a developer kit or a standalone EZ-B, suggest a battery, charger, and barrel to deans adapter cable. When buying a camera, suggest an extension cable. Maybe like Amazon does where you show "others who bought this also bought xxx"
Alan
I don't have the time to respond but I'd like to weigh in on this topic as well as I have a little more insight to add to the conversation. I'll try to respond tonight. The summary of it is that there's more than one way to damage an servo, stall conditions are the most prevalent but there are few other ways. This information may be quite helpful for KC.
Thanks Alan for your suggestions, keep those ideas coming
@Jeremie,
I knew the ways which will blow a servo. (Please post them for others anyway.) I never had blown a servo before but NOT until recently. (I knew where is the panic switch.)
They blew just too easily. They are all dead in action (normal freely running action.) After the battery warning message, I can feel the heat from the servo. (Might be they need a heat sink.)
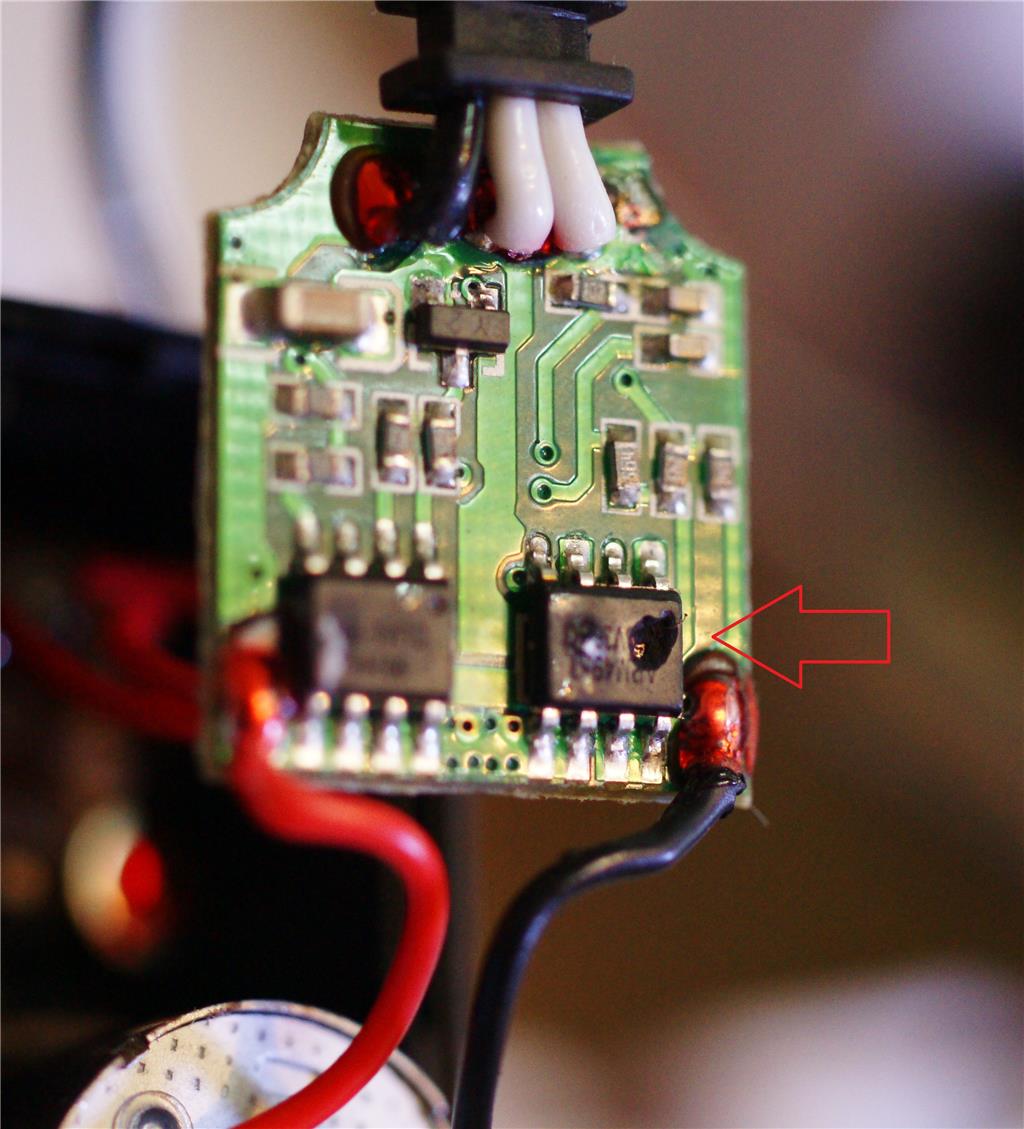
What my "concern" is I have 4 dead servos, and expecting a few more to come, what to do with them? Throwing them away is a waste, a set of shining metal gears, a powerful motor. Knowing that the FET blown in the little circuit, so I have to put them in a "dead" box and wait for some rescue.
Honestly speaking, the duty cycle of the servo need "some" improvement.
regards, KC.
Following up on KC's thoughts with what is probably a dumb idea.
If the servos are designed that the mosfet is the weak point, is there enough room (and appropriate parts available) that in a future hardware revision they could be a plug in rather than surface mount part so they can be easily replaced? Basically treat them like a smart replaceable fuse....
Alan
Hey guys, just hold out a few more hours and I'll post some info you may not have heard before. The answer is neither changing the duty cycle or making the servo electronics more modular. There are some best practices that I'll mention that may not be apparent when running metal-gear analog servo robots.
No, because the brushes on the motor short which is why the mosfet's blow.
If anyone feels they need more information to understanding the amount of testing on product development, please revisit my previous post.
Lastly, it's important to understand how a servo works, which can be found here: https://synthiam.com/Tutorials/Lesson/48?courseId=6
@DJ is correct that when the motor brushes short out the MOSFETs they see a zero ohm condition which damages them. This condition doesn't just damage the fets in our servos, for those that work with fets know, it would damage any fet. Now, you might be asking yourself "how do the motor brushes short out in the first place?".
We had a reviewer a while back that was unfamiliar with robots that used servos for locomotion. They were used to wheeled, H-Bridge driven robots. This person did not realize that they needed some pauses between their servo positions. The EZ-Script that they wrote caused the servos to vibrate extremely quickly back and forth, this caused damage to the motor brushes and in turn shorted out the MOSFETs. It didn't matter what kind of servos were in that robot that day, any servo with a brushed DC motor would not have lasted in that scenario. Brushed DC motors cannot keep instantly changing directions as it puts huge strain on the motor brushes and they can curl or break off. The best practice is to move a direction, pause, then move the other way. This limits the huge current spikes and crazy amounts of heat that can happen when instantly changing servo directions.
This is the reason that the ez-robot revolution example projects include many pauses, some may be small but any pause (sleep) helps. When building custom actions, creating a custom build, or doing any DIY design with servo motors it is important to keep this in mind.
That was pretty much all I really wanted to mention, but I had a couple more things "just in case".
I believe the majority of us here have probably been using servos for a long time. The difference though is that the majority of our experience has likely been with using plastic gear servos rather than metal gears. With plastic gears, it is the gears that fail first when placed in a high torque situation. This is not the case with metal gears. Metal gear servos will damage their own electronics (usually the MOSFETs go first) before the gears ever coming close to failing themselves.
Some conditions in which metal gear servos could damage the servo electronics are as follows:
Servos may not be calibrated [see here] or fine tuned [see here] and this could lead to servos running into each other during some actions
Servo output gear could be seeing some off-axis torque which could bind the gears. If a servo output gear is ever placed in a situation where it's being twisted in a direction that's different to it's regular plane of travel
If a robot is caught on an obstacle or object and is not freed from it in a timely fashion
Servo could be trying to lift too much weight, a custom build could be much heavier than a classic revolution robot
A foreign particle is introduced to the servo gearbox
Hope that helps guys!
Great info Jeremie. Thanks for the lesson. I bet I've destroyed a servo in each one of those examples you listed. LOL. eek