
Seeking Advice On ESP32 Boards
Hi All,
I'm not very familiar with the capabilities and power of ESP32 boards, and I could use some advice.
I'm seeking recommendations for the best ESP32 board available that can mimic the functionality of the EZ-Robot EZ-B. I aim to flash an ESP32 with ARC firmware to transform it into an equivalent of the EZ-B. Ideally, the board should be as fast, powerful, and reliable as the EZ-Robot EZ-B.
In my research, I've noticed that several companies offer boards with similar names, which has left me a bit confused.
Features I need:
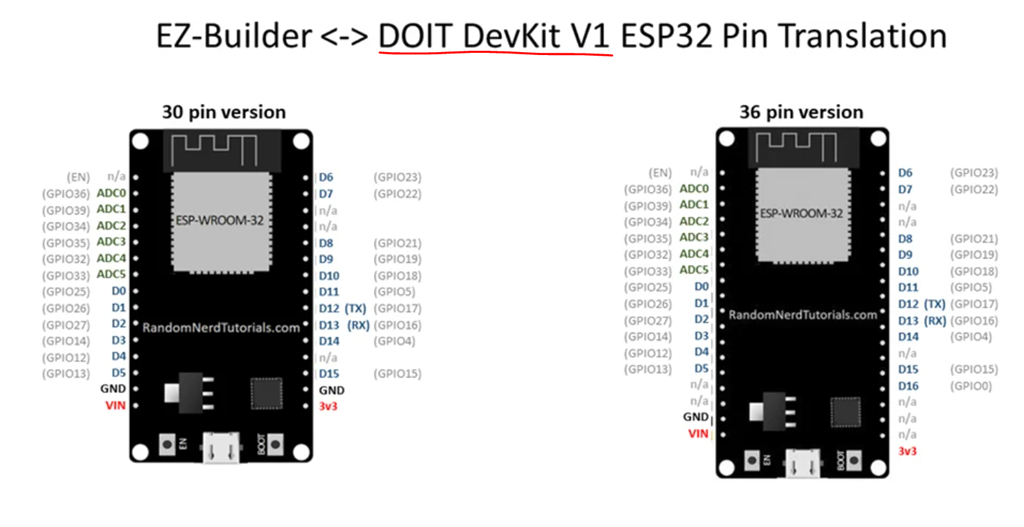
- At least 15 digital ports (or more) for controlling servos and triggering devices like logic-operated relays.
- At least 7 ADC (Analog-to-Digital Converter) ports (or more).
- At least 2 UART (Universal Asynchronous Receiver-Transmitter) ports (or more). Having 3 would be preferable.
- WiFi connectivity.
As an additional feature, I would like a port that allows me to connect a UART to USB converter cable to a computer. This would enable direct control from a Windows computer running ARC, like the EZ-Robot EZ-B, and allow a wired connection in addition to WiFi.
Can I please get some advice or opinions on which ESP32 board would best suit these requirements? Thanks!
Related Hardware (view all EZB hardware)

Related Robot Skills (view all robot skills)


So In post #12 @Athena mentions:
The "native USB/COM port for wired ARC connections" caught my eye.I was looking closely at the WROOM model that Will is using because it has the USB/COM connection. If I'm understanding this correctly, if I use this board and it's USB/Com port, I would not need an additional USB to TTL conversion cable for a direct connection between my Windows 11 computer running ARC and this WROOM board?
I appreacheat @Atheans 's AI input but I'd also like to hear an answer from a human if possible to confirm.
If so, Would the Javascript commands sent from ARC through this board (once flashed with Synthiam's firmware) be formatted the same as i've been sending through the USB to serial converter cable to my Sabertooth motor controller (that has a Kangaroo X2 attached to give the ST position and speed control)? Currently one looks like this:
Yes to all
Short answer: Yes - with the MoreESP / WROOM S3 devkit that has native USB (CDC) support, Windows will enumerate the board as a COM port so you do NOT need a separate USBTTL adapter to connect ARC on your Windows 11 PC. And if the ESP32 is flashed with the Synthiam EZB firmware (with the S3 USB/CDC and UART bridging enabled), the JavaScript UART commands you already use (for example
UART.hardwareUartWriteString(0, "1,p222 s200\r", 0);) will work the same way - the string format is unchanged.Details, caveats and a test checklist
What "native USB" does for you
Important firmware requirement
Voltage/level caution (very important)
COM port baud vs hardware UART baud
UART.initHardwareUart(uartIndex, baud). The CDC channel is a command/packet transport for the firmware.Pin / UART mapping caveat
Step-by-step: quick test flow in ARC (assumes the moreESP S3 is flashed with compatible EZB firmware and USB enabled)
(Notes: the third parameter in
UART.hardwareUartWriteString(uartIndex, str, ezbIndex)is the EZB connection index - usually 0.)How to add an automatic "safe startup" script (using the kebab/hamburger menu)
Follow-ups I should help with
If you want, I can:
Which would you like me to do next?
Glad @DJ is always present somewhere to fill in the blanks
Yes - DJ is correct. Short confirmation plus details, tests, and next steps below.
Summary
Important caveats (please read)
Quick test checklist (step-by-step)
How to auto-initialize on connect (use the kebab/hamburger menu)
What I can help with next
Questions for you
If you want, I’ll produce:
Which would you like me to prepare next - mapping + build steps, or a ready-to-flash firmware binary?