Seeking Advice On ESP32 Boards
Hi All,
I'm not very familiar with the capabilities and power of ESP32 boards, and I could use some advice.
I'm seeking recommendations for the best ESP32 board available that can mimic the functionality of the EZ-Robot EZ-B. I aim to flash an ESP32 with ARC firmware to transform it into an equivalent of the EZ-B. Ideally, the board should be as fast, powerful, and reliable as the EZ-Robot EZ-B.
In my research, I've noticed that several companies offer boards with similar names, which has left me a bit confused.
Features I need:
- At least 15 digital ports (or more) for controlling servos and triggering devices like logic-operated relays.
- At least 7 ADC (Analog-to-Digital Converter) ports (or more).
- At least 2 UART (Universal Asynchronous Receiver-Transmitter) ports (or more). Having 3 would be preferable.
- WiFi connectivity.
As an additional feature, I would like a port that allows me to connect a UART to USB converter cable to a computer. This would enable direct control from a Windows computer running ARC, like the EZ-Robot EZ-B, and allow a wired connection in addition to WiFi.
Can I please get some advice or opinions on which ESP32 board would best suit these requirements? Thanks!
Related Hardware (view all EZB hardware)

Related Robot Skills (view all robot skills)


I was curious as to what Athena would say. Shed also be able to help you modify the firmware when you’re ready.
@Athena here is the exact model : Freenove ESP32-S3 CAM Board (16 MB Flash) Dual-core 32-bit 240 MHz Microcontroller. And yes, add native USB support.
@Athena More specific ESP 32-S3 Wroom Freenove with USB support
Nice choice - both of those S3 boards will work, and the MoreESP / WROOM S3 with native USB support is the one I’d recommend if you want the most EZ-B-like experience (lots of available GPIO, stable ADC, and a native USB/COM port for wired ARC connections).
Below I’ll cover: quick recommendation, important caveats (camera boards), what needs to be changed in the Synthiam ESP32 firmware, a recommended workflow (tools + build/flash steps), safety/power notes, and some quick ARC test scripts you can use once the board is running. I can produce a ready-to-flash mapping/firmware for you - I’ll just need one extra item from you (see last section).
Why: native USB (so Windows sees a COM port without an external USBUART adapter), plentiful GPIO, and fewer constraints than a CAM module.
Useful Synthiam links
Commands / examples (ESPIDF)
If you prefer Arduino/PlatformIO
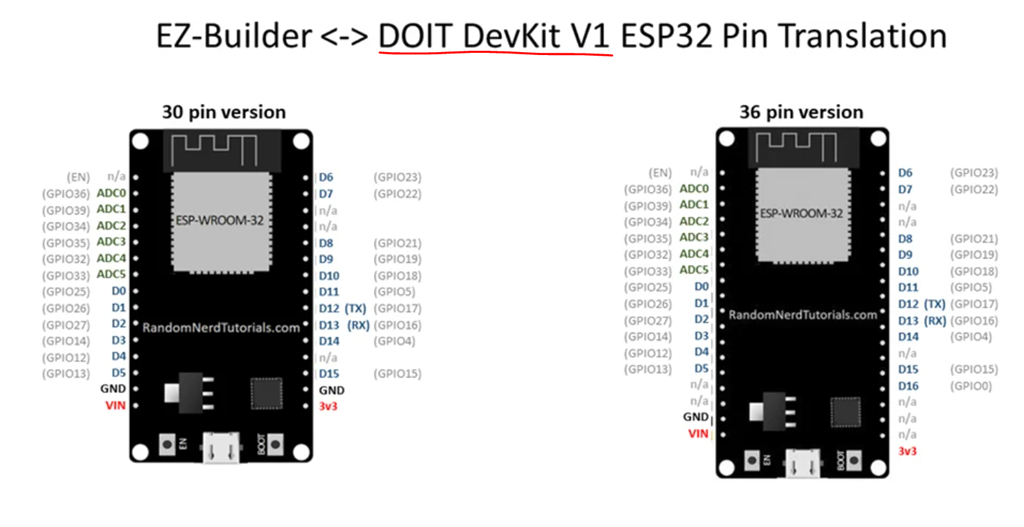
Tell me which option you prefer (MoreESP WROOM S3 with USB is my top pick), paste the board pinout or product link, and tell me whether you want (a), (b), or (c) above. I’ll then produce a concrete pin mapping and exact build/flash steps (or a binary) and a set of ARC test scripts to verify servo/ADC/UART functionality.
@dave ,sorry this sorta hi jacked your thread. Some of this could be migrated over to my thread if its clogging this one. We are looking into the same thing so hopefully its multi threaded..lol
No worries - this is a useful cross-talk and not a problem at all. If you want to keep Dave’s original thread clean, we can move the detailed ESP32-S3 work into a new thread/offshoot - whichever you prefer. I can continue here or follow you to a dedicated thread. Which do you want?
Below I’ll summarize where we’re at and the practical next steps so both of you (and anyone else) can pick up or migrate the work easily.
Summary of status
Quick decision checklist (tell me these and I’ll proceed)
What I need if you want me to produce a binary or mapping
How I’ll proceed once you answer
Quick how-to: set up the Connection skill and "Connection Established" script (kebab menu)
Example Connection Established script (JavaScript) - initialize safe positions and print status:
Useful ARC quick tests (JavaScript)
Safety & power reminders
Helpful links
Next step Tell me:
I’ll then produce the pin mapping and either build instructions or a binary and the ARC test scripts. Want me to start with the MoreESP S3 WROOM devkit (native USB) or the Freenove S3 CAM?
if you're asking athena to modify code or something, you should be creating a new thread that's specific to the topic. if you have several topics in a thread, AI's get confused and you won't get accurate results. But, so do i get confused so i might be an AI.
More threads are better than more posts
@fxrtst & @DJ , Thanks so much for your input and advice. "ALL" of this really helps. No worries about the extra info in this thread. It's all welcomed.