
Asked
— Edited
Scripting A Connection To A Second Ezbv4
Upon manually connecting to Board 0, I would like to establish a connection to Board 1 using EZ-Script, process some initialization there (ie: 1.D0 do thus and such) Can I and if yes, how do I connect to Board 1 from script?
Thanks!

Servo(1.D2, 180)
0.d1 = EZB board 0 digital port 1 1.D2 = ARC board 1 digital port 2 And so on
@merne Yeah - My question is not how to address the port on the board (once it is running). That's simple.
Can I CONNECT to Board 1 with CODE?
Can you give an example. are you asking if you can use ControlCommand to connect to board 1 if you have not manually push the connect button?
Controlcommand("connection", Connect1)
This is listed on the tab " cheat Sheet" when you open a script
Hope this is what you are asking
Cheers
BRAVO! (partly)
Interesting... Board 1 connected, executed it's Init Script, and when finished, the Init Script for Board 0 did NOT continue executing.
Bad Dog. Is there a way to get the rest of the InitScript for Board 0 to complete?
#Board 0 Script: SayEZB("Initializing Board Zero") Sleep(2000) ControlCommand( "Connection", "Connect1" )
#do the rest of my init routines for Board 0 here (is not happening...)
You need to increase the sleep command longer, thats what the sounds like. I believe you can also use a wait command to. Can you post a sample script?
First, use the [ code ] formatters if you wish to display code
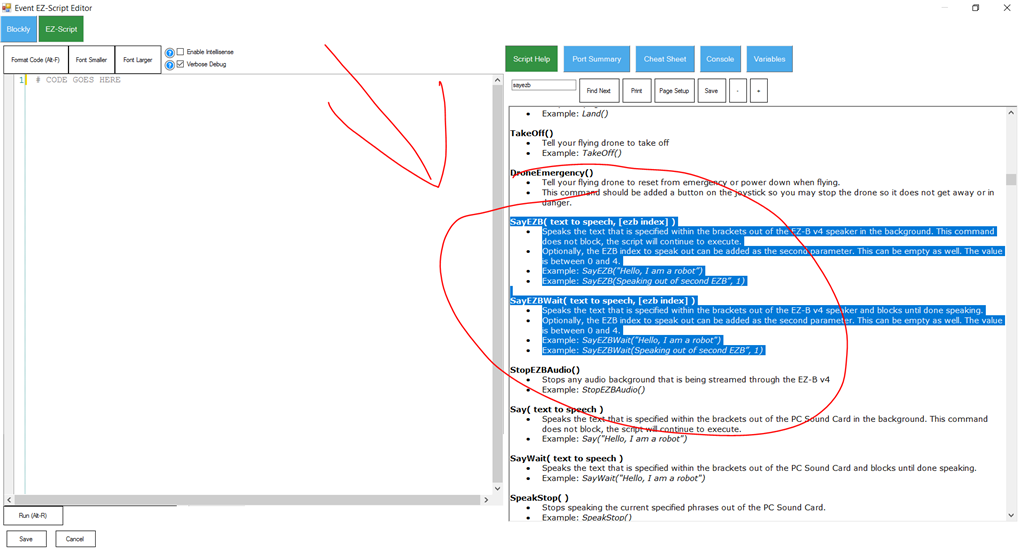
second, use the SayEZBWait() command if you want to wait for it to speak.
The EZ-Script manual is along the right when editing scripts. Here's a screenshot
When you see something BLUE in someones reply, you can click on it. For example the Cheat Sheet is in blue. Click on it so you can read about it. Also, ControlCommand is in blue, click on it so you can read about it.
Here is the InitScript running on Board 1 (ps Thank you for your help with this!)
I edited your post and put [ code ] [/ code ] tags around the code so people can read it